基于模型的PID控制器调优
交互式优化的PID模型万博1manbetx®
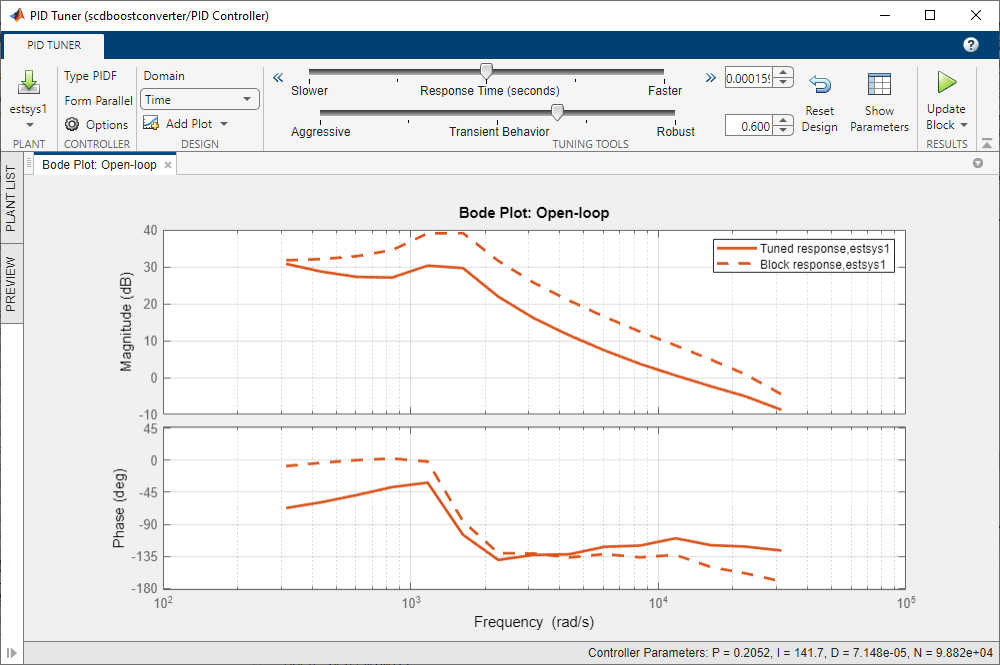
万博1manbetx仿真软件控制设计™PID调优工具允许您调整包含连续或离散单回路控制系统PID控制器或PID控制器(2自由度)万博1manbetx仿真软件。决定哪些PID调优工具为您的应用程序是正确的,看到的选择一个控制设计方法。
图形工具
| PID调谐器 | 调整PID控制器 |
块
| PID控制器 | 连续时间和离散PID控制器 |
| PID控制器(2自由度) | 连续时间和离散时间二自由度PID控制器 |
| 离散PID控制器 | 离散或连续PID控制器 |
| 离散PID控制器(2自由度) | 离散或连续时间二自由度PID控制器 |
工具
| 控制与仿真软件设计斜坡弯道万博1manbetx | 免费的,自学、互动万博1manbetx控制设计课程 |
主题
PID优化基础
- 选择一个控制设计方法
万博1manbetx仿真软件控制设计提供了几种方法来调优模型块,等万博1manbetx转移Fcn和PID控制器块。 - 介绍了基于模型的PID优化模型万博1manbetx
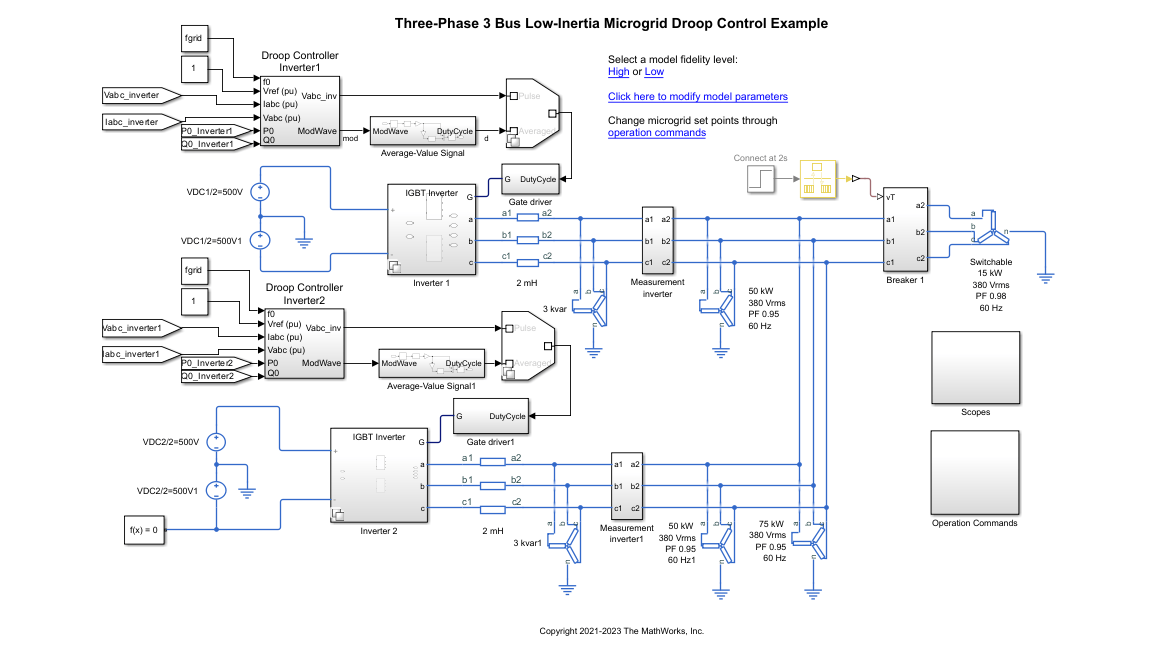
使用交互式优化的PID调节器PID仿真软件模型包含万博1manbetxPID控制器或PID控制器(2自由度)块。
- 调整PID控制器支持参考跟踪或抑制干扰
调整PID控制器以减少过度引用跟踪或提高核电站扰动输入的拒绝。 - 调整PID控制器在模型参考
当你打开PID调谐器从控制器在模型中引用一个或多个开放模型,指定的顶级模型线性化和调优。
选择植物模型
- 调整不同的操作点
默认情况下,PID调谐器中渗流你们工厂和设计一个控制器在初始条件所指定的操作点仿真软件模型。万博1manbetx有时,这个操作点的操作点不同于你想要设计一个控制器。 - 从植物频率特性数据设计PID控制器
当你的工厂没有线性化模型,一种选择是设计一个基于模拟PID控制器频率特性数据。万博1manbetx仿真软件控制设计给你几个方面。
- 交互式地估计植物从测量或模拟响应数据
对植物不线性化,如果你有系统辨识工具箱™软件,PID调谐器可以让你估计的参数线性植物模型基于时域响应数据。您可以调整PID控制器生成的估计模型。
Gain-Scheduled PID控制
- 设计的PID控制器对多个操作点
如果你的非线性仿真软件模型运行在一个万博1manbetx广泛的操作条件,您可以设计一个数组多个模型的PID控制器操作点。 - 实现Gain-Scheduled PID控制器
实施gain-scheduled控制使用的PID控制器,创建一个查找表,将每个工厂操作点与相应的PID增益。
二自由度PID控制器
- 二自由度PID控制器设计
调优PID控制器(2自由度)块实现好选点跟踪和抗干扰性。 - 指定πd和I-PD控制器
πd和I-PD控制器用于减轻的影响控制信号的参考信号的变化。这些控制器的变体2自由度PID控制器。
故障排除
一些仿真软万博1manbetx件模块,比如那些锋利的不连续性,可以产生糟糕的线性化的结果。例如,当您的模型在一个地区远离不连续,物体的线性化是零。
如果你不能找到一个好的设计使用PID调谐器,尝试不同的PID控制器类型。如果没有满意的PID控制器,考虑设计一个更复杂的控制器。
当您运行仿真软件模型使用PID计算P万博1manbetxID调谐器,仿真输出可以不同于PID调谐器响应图。
当您运行仿真软件模型使用PID计算P万博1manbetxID调谐器,仿真输出可能不满足您的设计要求。
如果控制器性能恶化使离散连续时间调整PID控制器时,可以考虑直接调优一个离散时间控制器。
当你使用PID调谐器设计一个控制器,由此产生的导数增益可以有一个不同的信号积分增益。PID调谐器总是返回一个稳定控制器,即使一个或更多的收益是负的。