PID控制器调整
Control System Toolbox™软件为调整PID控制器提供了多种工具和命令。要为应用程序选择最佳工具,请参阅选择PID控制器设计工具。
有关在Simulink中调整PID控制器的信息万博1manbetx®模型,参见基于模型的PID控制器调整(万博1manbetxSimulink Control Design)。
应用
| PID调谐器 | 调谐PID控制器 |
实时编辑任务
| 曲调PID控制器 | Tune PID控制器在直播编辑器中LTI工厂 |
功能
Pidtune. |
线性植物模型的PID调谐算法 |
PidtuneOptions. |
定义选项Pidtune.命令 |
getPidlopropresponse. |
具有PID控制器的系统的闭环和开环响应 |
Pidtuner. |
打开PID调谐的PID调谐器 |
话题
PID调整基础知识
控制系统工具箱软件提供了多种用于设计PID控制器的工具。
PID调谐器允许您执行PID控制器的自动,交互式调整。
控制系统工具箱PID调整工具可以生成和调整许多PID和2-DOF PID控制器类型。
交互式PID调整
调整PID控制器以满足上升时间和稳定时间要求。
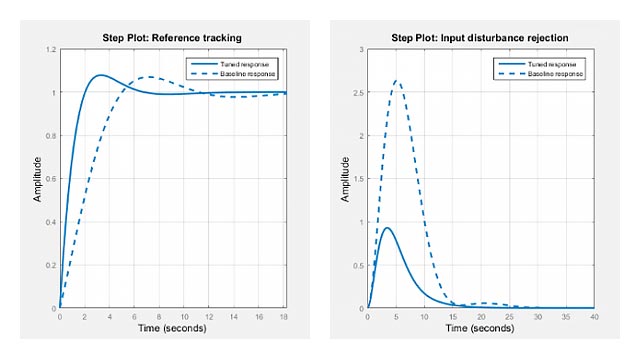
PID调谐是参考跟踪和干扰抑制性能之间的权衡。此示例显示使用PID调谐器时如何调谐到一个或另一个。
使用Tune PID控制器任务在Live Editor中生成代码,以设计用于线性工厂模型的PID控制器。
PID调谐器为调整PID控制器提供系统响应图和其他工具。
命令行PID调整
以编程方式使用PID控制器使用Pidtune.命令。
使用调整选项Pidtune.命令以支持指令行的参考跟踪或干扰拒绝。
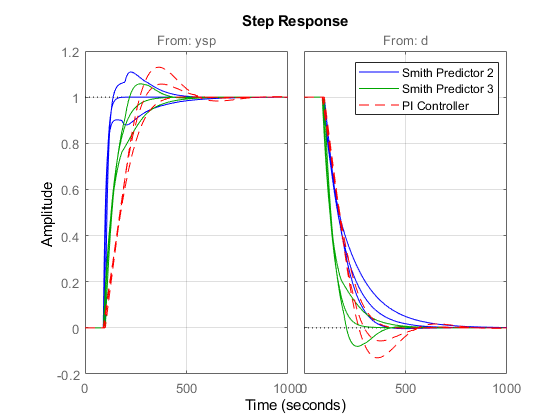
使用级联控制系统设计两个PI控制器Pidtune.命令。
PID控制器设计从测量响应数据
如果您有系统识别工具箱™软件,可以使用PID调谐器根据系统测量的响应数据来估计线性工厂模型。PID调谐器然后调整用于生成模型的PID控制器。
使用Live Editor Tasks从测量的工厂数据调整PID控制器
使用Live Editor任务来生成基于测量的工厂响应进行调整PID控制器的代码。
系统识别是根据系统响应对已知激励的系统响应来估计要控制的系统的动态表示的过程。
双程度自由的PID控制器
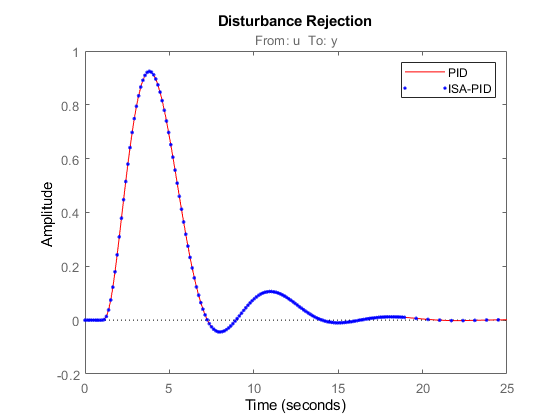
设计双程度自由(2-DOF)PID控制器,并将控制器性能与1-DOF PID控制器的控制器性能进行比较。
设计双程度自由(2-DOF)PID控制器,并将控制器性能与1-DOF PID控制器的控制器性能进行比较。
调整万博1manbetx
你可以调整的收益PID控制器使用PID调谐器实现具有所需响应时间的强大设计的块。
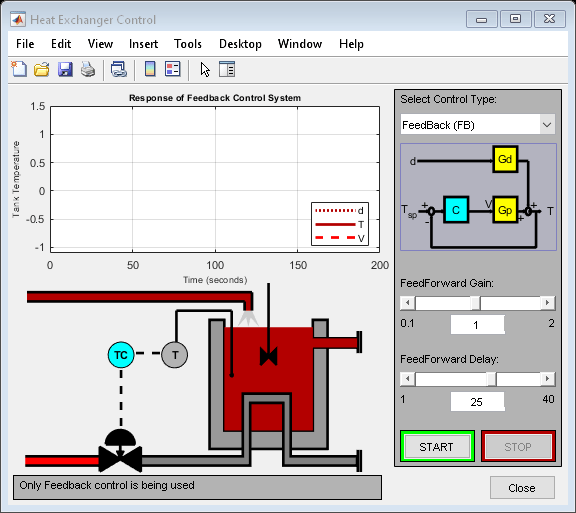
此示例显示如何调整无法线性化的工厂的PID控制器。
当您的工厂无法进行线性化时,您可以使用频率响应估计估计工厂模型,并将工厂模型导入PID调谐器。
特色例子
您还可以从以下列表中选择一个网站: