创建标签的自动化算法
的图片标志,贴标签机视频,激光雷达贴标签机(激光雷达工具箱)和地面实况贴标签机(自动驾驶工具箱)应用程序可以让你为各种数据源标记地面真相。您可以使用自动化算法通过创建和导入自定义自动化算法来自动标记数据。
创建新的算法
的vision.labeler.AutomationAlgorithm类允许您定义一个自定义标签自动化算法,以便在标签应用程序中使用。你可以使用类来定义应用程序用来运行自动化算法的接口。
要定义和使用自定义自动化算法,必须首先为算法定义一个类,并将其保存到适当的文件夹中。
创建自动化文件夹
创建一个+ / +贴标签机/愿景文件夹在MATLAB中的一个文件夹中®路径。例如,如果文件夹/地方/ MyProject在MATLAB路径上,然后创建+ / +贴标签机/愿景文件夹层次结构如下所示:
projectFolder = fullfile (“本地”,“。”);automationFolder = fullfile (“+视觉”,“+labeler”);mkdir(项目文件夹、自动文件夹)
/本地/MyProject/+vision/+labeler.
定义继承的类AutomationAlgorithm类
在MATLAB命令提示符下,输入适当的命令打开标签应用程序:
imageLabelervideoLabeler利达拉贝尔groundTruthLabeler
然后,加载数据源,创建至少一个标签定义,并在app toolstrip上选择选择算法>加法算法>创建新的算法.在vision.labeler.AutomationAlgorithm打开的类模板,定义自定义自动化算法。按照标题中的说明和类中的注释进行操作。
如果算法是按时间的,也就是说,依赖于执行的时间戳,您的自定义自动化算法也必须从vision.labeler.mixin.Temporal有关实现时间相关或时态算法的更多详细信息,请参阅颞自动化算法.
如果算法是分块图像基于,您的自定义自动化算法也必须从vision.labeler.mixin.BlockedImageAutomation有关实现阻止图像算法的更多详细信息,请参阅块图像自动化算法.
将类文件保存到Automation文件夹
要在标签应用程序中使用自定义算法,请将文件保存到+视觉/+贴标机您创建的文件夹。请确保此文件夹位于MATLAB搜索路径上。若要将文件夹添加到该路径,请使用地址路径函数。
在标签应用程序中刷新算法列表
要开始使用自定义算法,请刷新算法列表,以便算法显示在标签应用程序中。在应用程序工具条上,选择选择算法>刷新列表.
导入现有的算法
要将现有的自定义算法导入标签应用程序,请在应用程序工具条上选择选择算法>加法算法>进口算法然后刷新列表。
自定义算法执行
当你在标签应用程序中运行自动化会话时,自动化算法类中的属性和方法控制应用程序的行为。
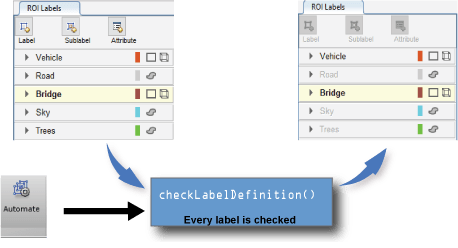
检查标签定义
当你点击自动化,应用程序将检查中的每个标签定义ROI标签和场景标签窗格,使用复选框定义方法在自定义算法中定义。返回的标签定义符合事实的为实现自动化而保留。返回的标签定义假是禁用的,不包括在内。使用此方法可选择对您的自定义算法有效的标签定义子集。例如,如果您的自定义算法是语义分割算法,则使用此方法返回假用于非类型的标签定义PixelLabel.
控制设置
选择算法后,单击自动化启动自动化会话。然后,单击设置,使您能够修改自定义应用程序设置。若要控制设置选项,使用设置对话框方法

控制算法执行
在应用程序中打开自动算法会话,然后单击运行,该应用程序调用checkSetup方法检查它是否已准备好执行。如果该方法返回假,应用程序不执行自动化算法。如果方法返回符合事实的,该应用程序调用初始化方法,然后是运行方法。然后,在自动化运行结束时,应用程序调用终止方法
该图显示了标签应用程序的执行流程。
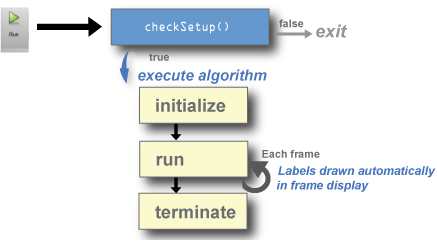
使用
checkSetup方法检查自定义算法所需的所有条件是否已正确设置。例如,在运行算法之前,请检查场景中是否至少包含一个ROI标签。使用
初始化方法使用框架初始化自定义算法的状态。使用
运行方法来实现算法的核心,该算法计算并返回每一帧的标签。使用
终止方法来在算法运行后清除或终止自动化算法的状态。
另请参阅
应用程序
功能
vision.labeler.AutomationAlgorithm|vision.labeler.mixin.Temporal|vision.labeler.mixin.BlockedImageAutomation
相关的例子
- 自动地面真相标记车道边界(自动驾驶工具箱)
- 用于语义分割的自动地面真值标注(自动驾驶工具箱)
- 自动化标记对象的属性(自动驾驶工具箱)
更多关于
- 开始使用图像标签
- 开始使用视频贴标机
- 开始使用激光雷达标签(激光雷达工具箱)
- 开始使用Ground Truth标签(自动驾驶工具箱)
- 颞自动化算法
- 块图像自动化算法
您还可以从以下列表中选择网站:
