YOLO v2入门
you only look once(YOLO)v2对象检测器使用单级对象检测网络。YOLO v2比其他两级深度学习对象检测器(例如具有卷积神经网络的区域(更快的R-CNN))更快。
YOLO v2模型对输入图像运行深度学习CNN,以生成网络预测。对象检测器解码预测并生成边界框。

预测图像中的对象
YOLO v2使用定位框来检测图像中的对象类。有关详细信息,请参阅用于目标检测的锚盒。yolo v2预测每个锚框的这三个属性:
联合交集(IoU)-预测每个锚定框的对象性得分。
锚定框偏移-优化锚定框位置
类别概率-预测分配给每个锚定框的类别标签。
该图示出了特征图中的每个位置处的预定义锚箱(虚线),并在偏移后施加偏移后的精细位置。匹配的盒子含有颜色。

迁移学习
通过迁移学习,您可以使用经过预训练的CNN作为YOLO v2检测网络中的特征提取器。使用约洛夫2层函数从任何预训练的CNN创建YOLO v2检测网络,例如MobileNet v2. 有关预训练CNN的列表,请参阅普里德深度神经网络(深度学习工具箱)
您还可以基于预折叠图像分类CNN设计自定义模型。有关更多详细信息,请参阅设计了一个yolov2检测网络.
设计了一个yolov2检测网络
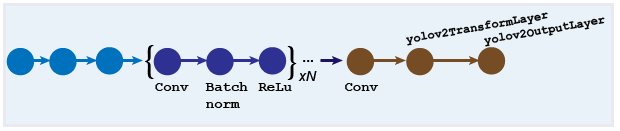
您可以按图层设计自定义YOLO V2模型层。该模型从一个特征提取器网络开始,可以从佩带的CNN初始化或从头开始训练。检测子网包含一系列conv,批量定额, 和雷卢层,然后是变换层和输出层,卵黄转移膜和yolov2OutputLayer物体分别。卵黄转移膜将原始CNN输出转换为生成对象检测所需的形式。yolov2OutputLayer定义锚盒参数,实现用于训练检测器的损耗功能。
您也可以使用深网络设计师(深度学习工具箱)手动创建网络的应用程序。该设计师采用了计算机视觉工具箱™ YOLO v2的特点。
设计一个带有Reorg层的YOLO v2检测网络
重组层(使用spaceToDepthLayer对象)和深度连接层(使用深度连接层(深度学习工具箱)对象)用于组合低级和高级功能。这些层通过添加低级图像信息和提高较小对象的检测精度来改进检测。通常,重组层附着到特征提取网络内的层,其输出特征映射大于特征提取层输出。
提示
调整
“块大小”财产的财产spaceToDepthLayer对象,使其输出大小与深度连接层(深度学习工具箱)目的。

有关如何创建此类网络的更多详细信息,请参阅创建YOLO v2对象检测网络.
用YOLO V2型训练并检测对象并检测对象
要学习如何通过使用CNN的YOLO深度学习技术训练对象探测器,看看基于YOLO v2深度学习的目标检测例子。
代码生成
学习如何生成CUDA®代码使用yolo v2对象检测器(使用它创建Yolov2物体检测器对象)参见使用YOLO v2生成目标检测代码.
为深度学习标记训练数据
你可以使用图片标识,视频贴标机或地面真理贴标机(自动驾驶工具箱)应用程序以交互方式标记像素并导出用于培训的标签数据。这些应用程序还可以用于标记矩形感兴趣区域(ROI)用于对象检测,场景标签用于图像分类,像素用于语义分割。要从任何标签机导出的地面真实对象创建训练数据,可以使用对象训练数据要么像素标签训练数据功能。有关更多详细信息,请参阅用于目标检测和语义分割的训练数据.
参考
[1] 雷蒙、约瑟夫和阿里·法哈迪。”YOLO9000:更好、更快、更强2017年IEEE计算机视觉和模式识别会议(CVPR),6517–25。檀香山,HI:IEEE,2017。https://doi.org/10.1109/CVPR.2017.690.
[2] Redmon,Joseph,Santosh Divvala,Ross Girshick和Ali Farhadi。“你只看一次:统一,实时对象检测。”计算机愿景和模式识别(CVPR),779-788的IEEE会议的诉讼程序. 内华达州拉斯维加斯:CVPR,2016年。
另见
应用程序
物体
功能
Trainyolov2ObjectDetector.|分析网络(深度学习工具箱)
相关实例
更多关于
- 用于目标检测的锚盒
- R-CNN、快速R-CNN和快速R-CNN入门
- 在Matlab中深入学习(深度学习工具箱)
- 普里德深度神经网络(深度学习工具箱)
您还可以从以下列表中选择一个网站:
