通过电机控制块的设置,您现在可以设计和实现从MATLAB版本2020B开始的感应电机的控制算法。块集提供的参考示例帮助您模拟针对逆变器和电机模型的控制算法。您还可以从相同的参考示例生成代码,该示例在微控制器上以20千赫兹的频率运行。
这是一个航运参考示例,以及一套用于感应电机的电机控制块。它与PMSM的参考示例非常相似。你可以参考这段关于PMSM的视频了解更多细节。感应电机的新模块包括ACIM控制参考模块,它接受参考暗转速和反馈转速值,并计算相应的b轴和q轴参考电流作为转速参考值。
这是在PI控制器之外,它控制转子速度,并为总体速度控制目标生成等效参考点。类似于PMSM参考示例,您可以使用Clarke, Park, Inverse Park,空间矢量发生器和ID和IQ电流回路的PI控制器实现面向场的控制算法。
此外,当前控制算法使用新添加的ACIM前馈控制块实现前馈控制,以解耦实现面向场控制所需的d访问和q访问电流[听不清]。电机控制库中还添加了一个新的转矩估计器块,它使用d轴和q轴电流的反馈值和电机速度反馈来估计机电转矩和功率。
在感应电动机中,电转速不同于机械转速。因此,新增的ACIM块滑移速度估计有助于估计感应电机磁场定向控制的滑移速度。正如在PMSM参考示例中,您可以通过将正交编码读数转换为位置和速度来处理位置和速度测量,使用由电机控制块集提供的这些块。
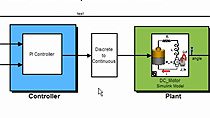
使用电机控制库中相应的块,验证异步电机和逆变器的线性黑模型的控制算法。使用仿真选项卡下的run按钮模拟模型,并在数据检查器中查看结果。您可以记录和可视化您在模型中感兴趣的任何信号,例如速度、负载转矩、ID IQ电流、电机看到的相A电压、空间矢量调制信号和其他信号。
您可以分析电机控制算法对不同场景的响应,如电机负载转矩变化或速度反转对IQ电流的影响,如图所示,以及相应的A相电压和空间矢量调制信号的变化。这些是众所周知的占空比调制信号,具有我们通过空间矢量调制获得的特征形状。
您可以通过修改控制参数来验证控制器性能,并运行多次模拟,直到达到可接受的性能水平。这里需要注意的一个有趣的点是,在模拟结果中没有数据点被丢弃,从而使Simulink成为一个重要的调试工具。万博1manbetx仔细观察计时宗教传说就会发现,内部电流循环——在这里显示为绿色——以20千赫兹的速度运行。
在外部速度控制(蓝色显示)下,在2千赫兹时运行速度慢10倍。接下来,您可以通过单击build、deploy和start按钮在嵌入式微控制器上实现您的算法。这将从Simulink模型生成代码,并将其部署到演示中使用万博1manbetx的DSC 2000硬件上,然后开始执行。
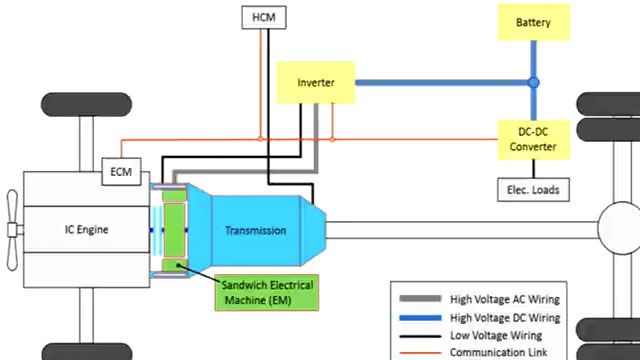
一旦完成,您现在可以旋转电机使用主机模型。这个模型建立了[听不清]与马达的通信。对于硬件演示,我们有一个简单的感应电机耦合到轴到PMSM,以创建一个动态设置。永磁同步电机提供速度反馈,并作为感应电机的负载。
生成的代码正在这个DSC 2000处理器上运行。你可以在这里设置参考速度,用这个按钮启动和停止电机。改变参考速度值,观察控制算法如何跟踪它们。现在,让我们试试速度反转。
您还可以通过在这里选择ID和IQ电流来查看它们的性能。标准化的值显示在示波器中。想象扭矩和功率。还有三相电流,用这个模型。如前所述,为当前控制循环生成的代码在DI硬件上以20千赫兹的速度运行——也就是说,小于50微秒。
而实际的面向现场的控制算法在10微秒内执行。所以尝试一下,看看你也可以使用电机控制块集和嵌入式编码器在嵌入式硬件上设计和部署感应电机的电机控制算法。