在这个视频中,我们将使用自适应MPC来自动驾驶汽车,由于纵向速度的变化,车辆的横向动力学随时间而变化。在之前的视频中,我们讨论了车辆的线性横向动力学并假设汽车具有恒定的纵向速度。所以,植物的动态是不变的状态矩阵A是不变的。为了控制该系统,我们采用了传统的MPC控制器。但现在我们让纵向速度随着汽车的行驶而变化。所以状态矩阵A也会改变。传统的MPC控制器在处理动态变化方面并不有效,因为它使用的是一个恒定的内部对象模型。那么,我们如何应对不断变化的植物动态呢?在第4部分视频中,我们讨论了自适应MPC可以让你在运行条件变化的每个时间步骤中提供一个新的线性电厂模型,因此它可以在新的运行条件下做出更准确的预测。因此,为了应对不断变化的植物动态,我们将使用适应性MPC。
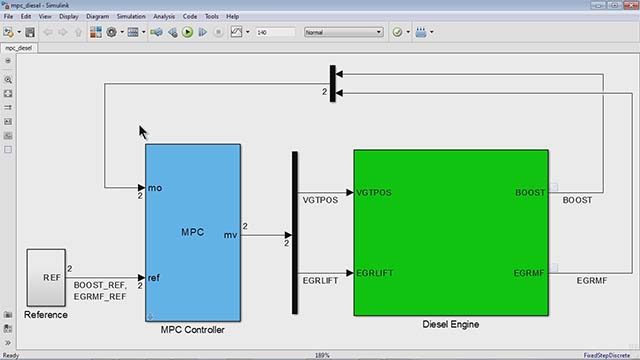
我们打开一个新的Simuli万博1manbetxnk模型,从这个自定义库中添加植物开始。在之前的视频中,该装置被开发为一个状态空间系统,输入为转向角,输出为横向位置和偏航角。这一次,它的动力学随着纵速度而变化。因此,这现在成为植物块的输入。我们将连接一个恒定的纵速度块,我们将最初设置为15米/秒,然后更改为另一个值。另一个输出是我们将在后面使用的状态。如果您想查看这些块,看看它们是如何构建的,可以从视频描述中给出的链接下载这个Simulink模型。万博1manbetx接下来,我们将连接模型预测控制工具箱下的自适应MPC块。该块具有与常规MPC块相同的输入和输出,除了它也采用在当前运行条件的每个时间步骤中更新的工厂模型。在此之前,我们已经为横向位置和偏航角设计了一个自定义参考。 We’ll first connect this reference to the controller. Then we connect the plant output to the measured outputs and the steering angle to the controller output. To implement the adaptive MPC, we can simply start with the MPC controller that we designed in the previous video for a longitudinal velocity of 15 m/s. We already have the MPC controller object in our workspace. By typing it in the command window, we can see the design parameters such as the prediction and control horizons, constraints and weights. One thing to note is that the adaptive MPC block requires a discrete plant model. So, we need to convert the continuous time state space model used by mpc1 to discrete time. There are different ways to do it. Here, we use the c2d command and update the plant model of the MPC object with the discretized plant. Now, we go back to the adaptive MPC block and type in the MPC object. Next, we need to provide the controller with a plant model that is updated at each time step for the current operating condition. The pre-built update plant model block takes care of this calculation. When we double click on it, we see that it has been implemented as a MATLAB function. As inputs, this function takes Vx, u and x and first calculates the state space matrices. It then computes the discrete model and also updates the nominal conditions with the current operating conditions. Now it’s time to connect the inputs and outputs for this block. We already have all the inputs here, longitudinal velocity, the steering angle and the states. The “model” input of the adaptive MPC control block requires the discrete-time model and nominal conditions in this order that we’ve created in the MATLAB function. To connect the outputs to the controller, we select the block, and create a bus signal. Now, we’re ready to try different longitudinal velocities and see how the controller handles the varying plant dynamics. In the previous video, the traditional MPC controller designed for an operating condition of 15 m/s had worked well while it failed to control the system at a different longitudinal velocity of 35 m/s. With adaptive MPC, we get a good controller performance when longitudinal velocity is 15 m/s. If we now change it to 35 m/s, we still get a good tracking of the lateral position and the yaw angle. We can even replace this constant block with a continuously changing signal such a sine wave and see that adaptive MPC still can deal with the changing plant dynamics and successfully control the system. We designed an adaptive MPC controller, ran several simulations to evaluate the controller performance. Now if you want to run your controller on your autonomous car, you can simply generate code using Embedded Coder and deploy it to your car. Here’s the generated C code. You can call the MPC controller code from your real-time scheduler using the entry points shown in the code interface report. Embedded Coder also lets you customize the call interfaces as required by your software framework and architecture.
这段视频展示了如何在自动驾驶汽车上运行MPC控制器和图像处理算法生成的代码,以使其保持在车道内。在Simulink之外开发的图像处理和车道检测算法,为MPC控制器提供这些输入。万博1manbetx以下是这些算法的工作原理。汽车的前视图是由安装在汽车顶部的摄像头拍摄的。图像处理算法识别实线和虚线标记,并检测车辆行驶的车道。车道的中间是中心线,它被用来计算汽车的位置从这条线的偏移以及偏航角。MPC控制器使用这些信息来保持汽车在中心线上。左边的图显示了汽车偏离中心线的红色和偏航角的绿色,而右边的图显示了转向角度。
在本视频中,我们讨论了如何使用自适应MPC来控制不断变化的动态,也讨论了如何生成C代码并部署它进行实时控制。有关模型预测控制的更多信息,请查看我们之前的Tech Talk视频。