模型预测控制工具箱
Entwerfen und Simulieren vonModellprädiktivenreglern
模具模型预测控制工具箱™bietet Funktionen,应用程序和Simulink万博1manbetx®Blöcke zum Entwerfen and Simulieren von Reglern mit linear arer and nicht linear modelellhersage - regelung (MPC)。Mit der Toolbox können Sie Anlagen- und Störungsmodelle, Zeithorizonte, Beschränkungen und Gewichte festlegen。我的模拟是können您是Reglergüte bewerten。
请您können为我们提供住宿,请您为我们提供住宿,请您während为我们提供住宿。Die Toolbox verfügt über bereitstellbare Optimierungs-Solver, ermöglicht aber auch den Einsatz benutzerdefinierter Solver。您的位置是正确的,位置是bzw。MPCs获得调度einsetzen。Für Anwendungen mit schnellen Abtastraten können您的basierend auf einem regulären Regler einen expliziten modellprädiktiven Regler generieren ober eine Näherungslösung anwenden。
Zur Unterstützung von Rapid Prototyping and Embedded-Systemen sowie der Bereitstellung von optimierung - solvern bietet die Toolbox die Möglichkeit Zur Generierung von C Code and die Erstellung von strukturiertem Text gemäß IEC 61131-3。
现在beginnen:

MPC Designer-App
塞尔森奇Ein Internes Anlagenmodell.,Passen Sie Zeithorizonte,Gewichte undBeschränkungenan,UM Interaktiv MPC-Regler Zu Ontwerfen。Simulieren Sie Die Systemantwort,Um DieReglergütezubewerten。Vergleichen Sie Das Verhalten verschiedener MPC-Regler。
MPC-Entwurf在Sim万博1manbetxulink
Modellieren和simuleren Sie MPC-Regler在Simulink万博1manbetx中mit dem MPC-Reglerblock sowie anderen der Toolbox verfügbaren Blöcken。Trimmen and linearisieren en in si万博1manbetxmulin - model, um in internes lti - anlagenmodel für Ihren MPC-Regler zu berechnen, and berechnen Sie die名义Werte für die ein - Ausgänge from Anlage mit万博1manbetx仿真软件控制设计™。
在MATLAB MPC-Entwurf
Verwenden Sie Funktionen Aus der Kommandozeile,UM MPC-Regler Zu Entwerfen。Defieren Sie Ein Internes Anlagenmodell,Passen Sie Gewichte,BeschränkungenundandereRegerperparameter An Und Simulieren Sie Die Systemantwort Im Geschlossenen Regelkreis,Um DieReglegütezubewerten。

我是Kommandozeile的mpc - reggren
VorgefertigteBlöcke.
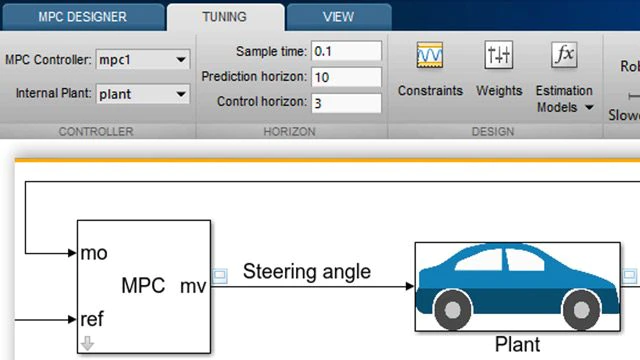
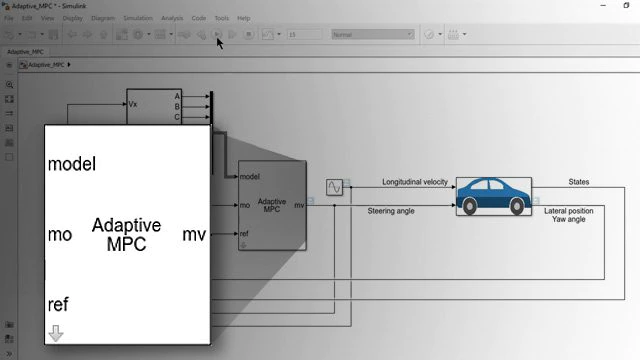
Nutzen Sie die Blöcke für adaptive Geschwindigkeitsregelung, Spurhalteassistent and wegfolgesystals Ausgangspunkt für Ihre ADAS-Anwendung和personalisieren Sie das Design wie gewünscht。您的密码是:Blöcken,嗯MPC-Regler einzusetzen。

Verwendung des vorgefertigten 万博1manbetxSimulink-Blocks zum Entwurf adaptiver Geschwindigkeitsregelungssysteme。
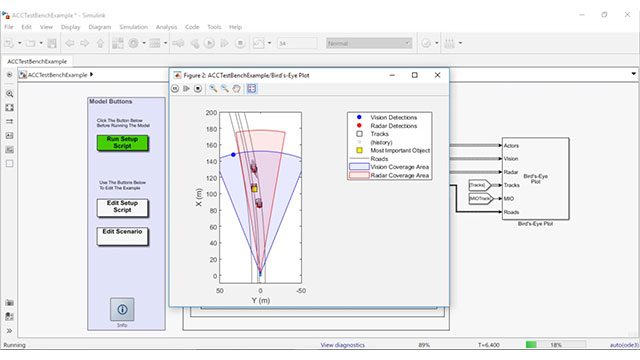
reverenzanwendungen.
Nutzen SIE Referenzanwendungen,死Ihnen死AbläufeDES Entwurfs UND Einsatzes冯MPC-Reglern献给IHRE automatisierten Fahrsysteme Schritt献给Schrittnäherbringen。Referenzanwendungen zeigen Ihnen ebenso,魏某模具verschiedenen TEILE Ihres系统MIT unterschiedlichen Genauigkeitsgraden modelliert werdenkönnen。
Lineare MPC-Regler
您可以使用控制系统工具箱™einen linearen MPC-Regler,您可以使用anlagenmodelals in linear zeitinvariantes (LTI) System specifications ieren in Simulink- modelell mittels Simulink Control Design linea万博1manbetxrisieren。Alternativ können请将系统识别工具箱™安装在gemessenen Eingangs和Ausgangsdaten erstelltes modelell importieren中。

Spezifizierung Eines InternenNanlagenModellsFürdennentwurf欧莱恩林林MPC-eglers。
Adaptiver MPC-Regler公司
Entwerfen und Simulieren Sie Adaptive MPC-Regler,Indem Sie Die Kommandozeilenfunktionenen und Den Addiven MPC-Reglerblock Verwenden。Aktualisieren Sie Ihr AnlagenmodellWährendder Laufzeit und Stellen Sie Das Modell Als Regler-Eingabewert Bereit。Verwenden Sie Einen Integerierten,Linearen und Zeitvariablen(LTV)卡尔曼 - 滤波器MIT Garantierter asymptotischerStabilitätfürfürfürfürfürfüriezustandsschätzung,在AddivenModellprädiktivenreglern。
MPC MIT Gaintcheduling.
Regeln Sie nicht lineare Anlagen über eine Vielzahl von Betriebsbedingungen mit dem Reglerblock für multiple MPC-Regler。请您在MPC-Regler für jeden Betriebspunkt和您在während der Laufzeit zwisen den Reglern。

多重MPC-Reglerblocks的Verwendung zum Entwerfen eines MPC-Reglers mit Gainscheduling。
雷格勒参数
Nach der Definition des internen anlagen模型schließen Sie das Design Ihres MPC-Reglers ab, indem Sie Abtastintervalle, pronose - und Kontrollhorizonte, Skalierfaktoren, Eingangs- und Ausgangsbeschränkungen sowie Gewichte festlegen。Die Toolbox unterstützt ebenso Die Abmilderung von Beschränkungen sowie zeitvariable Beschränkungen and gewicte。

Festlegen der regler -参数在MPC设计器应用程序。
Zustandsschätzung.
Schätzen您可以输入Reglerzustände,我们可以输入积分值。可选können Sie einen benutzerdefinerte Zustandsschätzalgorithmus verwenden。

BenutzerdefinierteZustandsschätzung。
Designuberprufung
如果有问题,请在MPC-Reglers上进行集成诊断。请您给我一个诊断,给我一个礼物,然后-Beschränkungen während给我一个礼物,嗯,给我一个礼物。

Verbesserung des Regler-Designs mithilfe von Empfehlungen des Designüberprüfungsberichts。
Laufzeit-parameterabstimmung
Passen Sie Die Gewichte undBeschränkungenIhresMPC-ReglersWährendder Laufzeit An,UM SeineGütehneNeuesDesign Oder Neue Implientierung Zu Optimieren。Nehmen Sie Die Laufzeit-Regler-Abstimmung Sowohl在Matlab®Als Auch在Sim万博1manbetxulink Vor中。

在Gewichte和Beschränkungen während der Laufzeit。
Laufzeitleistungsuberwachung
Greifen酒店SIE奥夫DAS Optimierungsstatus信号祖,嗯死seltenenFälle祖erfassen,在田园EINE优化处理falsch konvergiert,UND entscheiden SIE丹恩,OB EIN备份-Regler公司的Zum Einsatz kommen远洋地产。

Erfassen von Regler-ausfällen在Echtzeit。
Expliziter MPC-Regler
ERSTELLEN SIE einen expliziten MPC-Regler公司basierend奥夫einem impliziten MPC-Entwurf楚schnellerenAusführung。Vereinfachen SIE einen erstellten expliziten MPC-Regler公司UND verringern SIE所以书房Arbeitsspeicherbedarf。

ERSTELLEN EINES expliziten MPC-Reglers basierend奥夫einem vorab entworfenen impliziten Regler公司。
(Suboptimale) Naherungslosung
Entwerfen, simulieren and verwenden Sie MPC-Regler mit garantierter Worst-Case-Ausführzeit durch Verwendung einer (suboptimalen) Näherungslösung。

Vergleich德Ausführzeitenoptimaler UND(suboptimaler)Näherungslösungen。
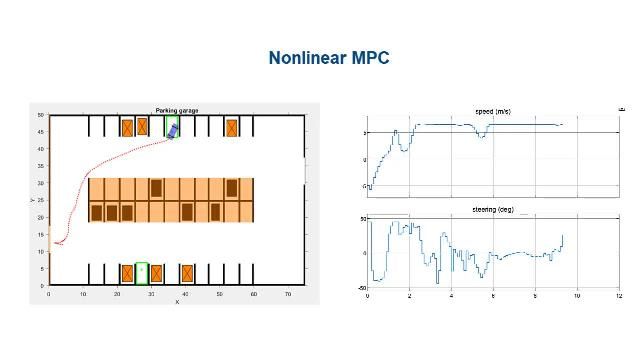
Optimale Planung
Verwendung nicht linearer MPC-Regler für optimale Planungsanwendungen, die in nicht lineares model mit nicht linearen Kosten oder Einschränkungen erfordern。

Trajektorien-UND优化处理冯Regelung MIT Flugrobotern nicht linearer MPC-Regelung。
反馈 - regelung
Simulieren SIE einen geschlossenen Regelkreis冯nicht linearen原基温特nicht linearen Kosten UNDBeschränkungen。Standardmäßigverwenden nicht佛甲MPC-Regler公司模具优化工具箱™,嗯DAS问题nicht linearer Programmierung祖beheben。SIEkönnenebenso einen eigenen benutzerdefiniert nicht linearen求解festlegen。

nichtlinemodellprädiktive Regelung eines exoothermen chemereaktors。
Okonomischer MPC-Regler
DesignenSieÖkonomischeMPC-Regler Zur Optimierung des ReglersFüreine beliebige Kostenfunktion Unter Beliebigen Nicht LinearenBeschränkungen。SieKönnenein线性oder ein nicht线性prognosemodell anwenden,Eine benutzerdefinceerte nicht lineare kostenfunktion sowie benutzerdefinierte nicht linearebeschränkungen。

ÖkonomischeMPC-Regelung北德Ethylenoxidproduktion。
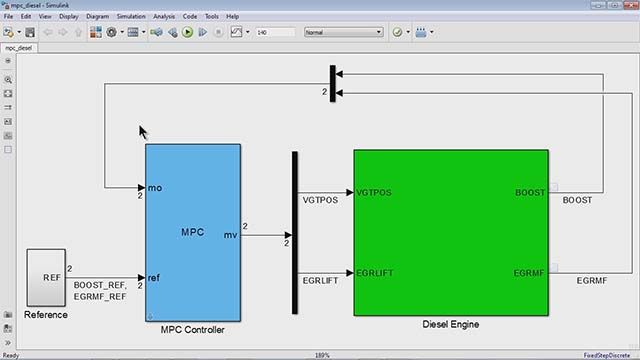
结合MATLAB和Simulink编写代码万博1manbetx
Entwerfen SIE einen MPC-Regler公司在S万博1manbetximulink UND ERSTELLEN SIE C代码UND IEC 61131-3-konformen strukturierten文字麻省理工学院的Simulink马克编码器™bzw.万博1manbetxSimulink的PLC编码器™。Verwenden SIE MATLAB编码器™,嗯C代码在MATLAB祖schreiben UND IHN楚Echtzeit-Regelung祖nutzen。吴国良könnenSIE MPC-Regler公司奥赫MIT数字高程模型MATLAB编译器™einsetzen,einereigenständigausführbarenAnwendung。

代码来源于MPC-Reglerblock。
Integrierter解算器
Generieren Sie Code Mit DemVerfügBarenQP-Solver(Quadratische Programmierung)Füreine effizienteumsetzung在einem eingebettenen prozessor。Nutzen Sie Bei Nicht Linearen archeden Den Sqp-solver(Sequenzielle Quadratische Programmierung)AUS Der Optimization Toolbox Zur Simulation Und Codegenerierung。Stellen Sie Denierierten CodeFüreine beliebige anzahl von prozessoren bereit。

Integrierte解算器。
Benutzerdefinierte Solver
Verwenden Sie.Embotech迫使Pro QP-und NLP-Solver(Nicht Lineare Programmierung),UM Lineare und Nicht Linear MPC-Regler Zu Simulieren und Code Zu Generieren。Alternativ Lassen Sich Benutzerdefinierte QP-und NLP-Solver Zur Simulation Und Codegenerung EInsetzen。

Benutzerdefinierter QP-Solver zur Simulation and Codegenerierung。