调整增益预定三回路自动驾驶仪
这个示例使用systune为三回路自动驾驶仪产生平稳增益时间表。
机身模型和三回路自动驾驶仪
本例使用了一个三自由度的飞机俯仰轴动力学模型。状态是地球坐标 ,身体坐标
,身体坐标 ,桨距角
,桨距角 和俯仰率
和俯仰率 。图1总结了惯性和机体框架、飞行轨迹角之间的关系
。图1总结了惯性和机体框架、飞行轨迹角之间的关系 ,入射角
,入射角 ,以及俯仰角。
,以及俯仰角。
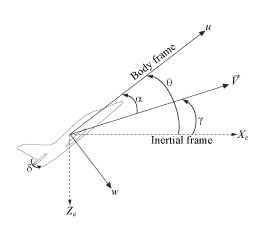
图1:机身动力学。
我们使用了经典的三回路自动驾驶仪结构来控制飞行路径角度。这款自动驾驶仪通过提供足够的正常加速来调整飞行路径 (沿加速
(沿加速 )。反过来,正常加速度是通过调节电梯偏转产生
)。反过来,正常加速度是通过调节电梯偏转产生 引起俯仰并改变升力的大小。自动驾驶仪在俯仰率回路中使用比例积分(PI)控制
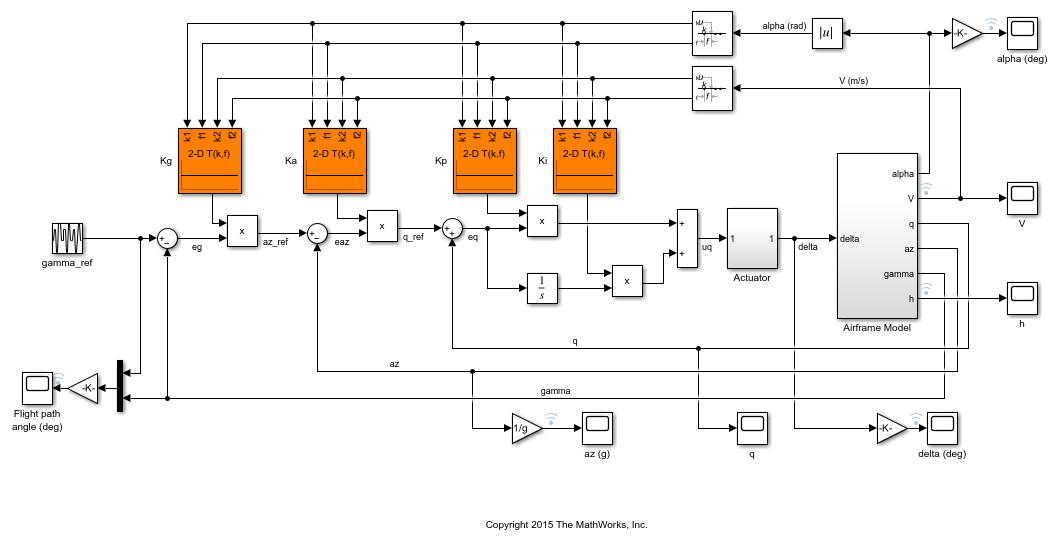
引起俯仰并改变升力的大小。自动驾驶仪在俯仰率回路中使用比例积分(PI)控制 和比例控制在和循环。在Simulink中对闭环系统(机身和自动驾驶仪)进行建模。万博1manbetx
和比例控制在和循环。在Simulink中对闭环系统(机身和自动驾驶仪)进行建模。万博1manbetx
让addpath(完整文件(matlabroot,“例子”,“控制”,“主要”))添加示例数据open_system (“rct_airframeGS”)
自动增益调度
机体动力学是非线性的,气动力和力矩与速度有关 和发病率。在整个过程中获得合适的表现
和发病率。在整个过程中获得合适的表现 飞行包线,自动驾驶仪的收益也必须进行调整的功能和以补偿装置动态变化。这一调整过程被称为“增益调度”和
飞行包线,自动驾驶仪的收益也必须进行调整的功能和以补偿装置动态变化。这一调整过程被称为“增益调度”和 被称为调度变量。在Simuli万博1manbetxnk模型,收益时间表实现,如通过测量驱动查找表和。
被称为调度变量。在Simuli万博1manbetxnk模型,收益时间表实现,如通过测量驱动查找表和。
增益调度是用于控制非线性或随时间变化的植物的线性技术。这样做是为了在计算各种操作条件下的植物的线性近似,调在每一个操作条件的控制器增益,以及交换增益作为操作期间操作条件的函数。传统的增益调度涉及三个主要步骤:
修剪,并在每个工作状态的线性化厂
在每个运行条件下,针对线性化的动力学调整控制器增益
协调增益值,以提供运行条件之间的平稳过渡。
在本例中,我们合并了步骤2。和3。通过参数化自动驾驶仪的增益为一阶多项式直接调整整个飞行包络线的多项式系数。这种方法消除了第3步。并保证增益作为的函数平稳变化和。此外,增益调度系数可以自动调谐systune。
修剪和线性化
假设入射-20度和20度之间,并且,所述速度变化变化在700到1400米/秒之间。当忽略重力时,机体动力学是对称的所以只考虑正数。使用5乘9的线性间隔的网格成对覆盖飞行信封:
NA = 5;值的%数nV = 9;V值的%数(α,V) = ndgrid (linspace(0, 20日nA) *π/ 180,linspace(700、1400、nV));
每种飞行状态,使飞机在纵倾时的动力学线性化(零法向加速度和俯仰力矩)。这需要计算电梯的偏转和球场结果是稳定的和。要做到这一点,首先在一个单独的Simulink模型中分离机身模型。万博1manbetx
open_system ('rct_airframeTRIM')

用operspec指定修剪条件,使用findop计算的调整值和和线性化该所得工作点机身动力学。见在Simulink控制设计细节的“裁剪和线性机身”的例子。万博1manbetx重复这些步骤为45的飞行条件。
%计算每对(alpha,V)的修剪条件清晰的人事处对于1:nA*nV alpha_ini = alpha(ct);% (rad)发生率v_ini = V(CT);%的速度(米/秒)%指定修剪条件opspec = operspec('rct_airframeTRIM');% Xe,Ze:已知,不稳定opspec.States(1)。知道= (1,1);opspec.States(1)。稳态= (0,0);知道,稳定opspec.States(3)。[11];opspec.States(3)。= [0 1];% theta:已知,不稳定opspec.States(2)。= 1;opspec.States(2)。稳态= 0;未知,稳定opspec.States(4)。知道= 0;opspec.States(4)。稳态= 1;%修剪选项= findopOptions('DisplayReport',“关闭”);op (ct) = findop ('rct_airframeTRIM',opspec,选项);结束在修整条件%线性化G =线性化('rct_airframeTRIM', op);重塑;重塑;G.u ='三角洲';G.y = {“α”'V''Q'“阿兹”“伽马”“h”};
这将产生一个5×9阵列线性化植物模型在45个飞行条件。植物的动态在飞行包络线上变化很大。
σ(G)、标题(“变异机身动态”)

可调增益面
自动驾驶仪有四个增益 被“安排”(调整)的功能和。实际上,这意味着调优4个对应查找表中的88个值。与其单独调优每个表项,不如将增益参数化为二维增益表面,例如,与简单的多线性相关的表面和:
被“安排”(调整)的功能和。实际上,这意味着调优4个对应查找表中的88个值。与其单独调优每个表项,不如将增益参数化为二维增益表面,例如,与简单的多线性相关的表面和:
 。
。
这将每个查找表的变量数量从88个减少到4个。使用tunableSurface对象参数化每个增益表面。注意:
TuningGrid指定“调优网格”(设计点)。这个网格应该匹配用于线性化的网格,但不需要匹配循环表断点ShapeFcn指定表面参数化的基本函数( ,
, ,
, )
)

使用调优结果将每个表面初始化为常数增益= 10摄氏度和= 1050米/秒(中程设计)
TuningGrid =结构(“α”α,'V',V);ShapeFcn = @(α,V)的α,V,α-* V];KP = tunableSurface(“金伯利进程”, 0.1, TuningGrid, ShapeFcn);Ki = tunableSurface (“文”, 2, TuningGrid, ShapeFcn);Ka = tunableSurface (“咔”,0.001,TuningGrid,ShapeFcn);公斤= tunableSurface('公斤', -1000, TuningGrid, ShapeFcn);
接下来创建一个slTuner接口进行调整的增益的表面。使用区块取代由线性模型通过调整电网来代替非线性工厂模型。用setBlockParam关联可调增益曲面Kp,Ki,卡,公斤具有相同名称的插值块。
BlockSubs =结构('名称',“rct_airframeGS /机身模型”,'值'G);ST0 = slTuner (“rct_airframeGS”,{“金伯利进程”,“文”,“咔”,'公斤'}, BlockSubs);标记感兴趣的点ST0.addPoint ({'az_ref',“阿兹”,'gamma_ref',“伽马”,'三角洲'})%参数化查找表块ST0.setBlockParam (“金伯利进程”Kp,“文”吻,“咔”卡,'公斤'公斤);
自动调优
systune可以自动调整增益面系数为整个飞行包络线。用TuningGoal对象指定的性能目标:
 环:跟踪与1秒的响应时间,少于2%的稳态误差设定值,且小于30%的峰值误差。
环:跟踪与1秒的响应时间,少于2%的稳态误差设定值,且小于30%的峰值误差。
Req1 = TuningGoal.Tracking ('gamma_ref',“伽马”,1,0.02,1.3);viewGoal(REQ1)

 环路:确保良好的低频干扰抑制(跟踪加速度需求)和超过10 rad/s(对测量噪声不敏感)。
环路:确保良好的低频干扰抑制(跟踪加速度需求)和超过10 rad/s(对测量噪声不敏感)。
注意:干扰被注入到az_ref位置拒收率= frd([0.02 0.02 1.2 1.2 0.1],[0 0.02 2 15 150]);Req2 = TuningGoal.Gain ('az_ref',“阿兹”, RejectionProfile);viewGoal (Req2)

 环路:确保良好的干扰抑制高达10 rad/s。扰动注入到植物的输入端
环路:确保良好的干扰抑制高达10 rad/s。扰动注入到植物的输入端δ。
Req3 = TuningGoal.Gain ('三角洲',“阿兹”, 600 *特遣部队(0.25 [0],[0.25 - 1]));viewGoal (Req3)

瞬态:确保无振动瞬态的最小阻尼比为0.35
MinDamping = 0.35;Req4 = TuningGoal.Poles (0, MinDamping);
运用systune,调整16增益表面系数最好地满足所有45种飞行条件下这些性能要求。
(ST0,[Req1 Req2 Req3 Req4]);
Final: Soft = 1.13, Hard = -Inf, iteration = 57
组合目标的最终值接近1,表示所有的要求都满足近。可视化所得到的增益的表面。
获得调谐增益表面TGS = getBlockParam (ST);增益面%CLF副区(221),viewSurf(TGS.Kp),标题(“金伯利进程”)分图(222)、viewSurf(TGS.Ki)、标题(“文”) subplot(223)、viewSurf(TGS.Ka)、title(“咔”)副区(224),viewSurf(TGS.Kg),标题('公斤')

验证
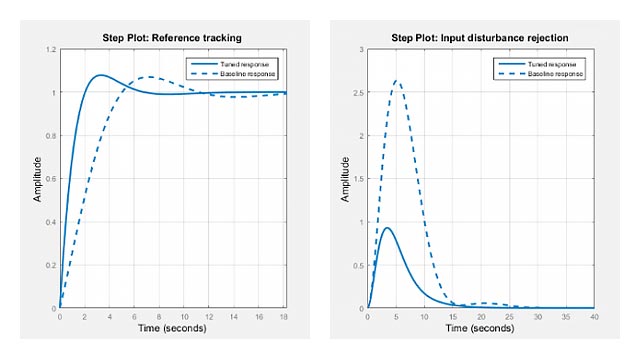
首先验证调优后的自动驾驶仪在上述45种飞行条件下的性能。画出对飞行路径角阶跃变化的响应和对电梯偏转阶跃扰动的响应。
clf次要情节(211),步骤(getIOTransfer(圣,'gamma_ref',“伽马”网格)、5)、标题(“在飞行路径角度阶跃变化的追踪”)次要情节(212)步骤(getIOTransfer(圣,'三角洲',“阿兹”), 3)、网格标题(“对植物输入阶跃干扰的抑制”)

所有飞行条件下的反应都令人满意。接下来验证自动驾驶仪对非线性机身模型。第一次使用writeBlockValue将调优结果应用于Simulink模型。万博1manbetx这将在两个预查找块中指定的断点处计算每个增益曲面公式,并将结果写入相应的插值块。
writeBlockValue (ST)
现在模拟自动驾驶仪的性能为一个机动,使机身通过它的飞行包的很大一部分。下面的代码相当于在Simulink模型中按下Play按钮并检查Scope块中的响应。万博1manbetx
%初始条件h_ini = 1000;alpha_ini = 0;v_ini = 700;%模拟SimOut = sim卡(“rct_airframeGS”,“ReturnWorkspaceOutputs”,'上');%提取模拟数据SimData =得到(SimOut,“sigsOut”);Sim_gamma = getElement (SimData,“伽马”);Sim_alpha = getElement (SimData,“α”);Sim_V = getElement (SimData,'V');Sim_delta = getElement (SimData,'三角洲');Sim_h = getElement (SimData,“h”);Sim_az = getElement(SIMDATA,“阿兹”);T = Sim_gamma.Values.Time;%绘制主飞行变量CLF副区(211)情节(T,Sim_gamma.Values.Data(:,1),“r——”t Sim_gamma.Values.Data (:, 2),“b”)、网格传奇(“吩咐”,“实际”,'位置',“东南”)标题(“飞行路径角\gamma单位为度”) subplot(212) plot(t,Sim_delta.Values.Data),网格标题(“电梯偏转\增量度”)

plot(t,Sim_alpha.Values.Data),网格标题(“以度发病\阿尔法”)副区(212)情节(T,Sim_V.Values.Data),网格标题(速度V,单位是m/s)

plot(t,Sim_h.Values.Data),网格标题(“高度h,米”) subplot(212) plot(t,Sim_az.Values.Data),网格标题(“以g正常加速A_Z”的)

在整个机动过程中,飞行轨迹角度剖面保持良好。请注意发生率的变化和速度覆盖大部分这里考虑的飞行包线([-20,20]为度和[700,1400]为)。当自动驾驶仪被调整到3000米的标称高度时,它在1000米到10000米的高度变化中表现良好。
非线性仿真结果证实,增益调度自动驾驶仪提供整个飞行包线内始终如一的高性能。的“增益表面调整”过程提供了所述调度变量的增益依赖简单明确的公式。除了使用查找表的,可以直接使用这些公式的内存更高效的硬件实现。
rmpath (fullfile (matlabroot,“例子”,“控制”,“主要”))删除示例数据
您也可以从以下列表中选择一个网站: