Simulink中的自动泊车代客泊车万博1manbetx
这个例子展示了如何在Simulink®中使用自动驾驶工具箱构建一个自动泊车代客系统。万博1manbetx它紧随着自动停车员MATLAB®示例。
介绍
把停在停车场前的车自动停车是一个具有挑战性的问题。车辆的自动系统预计将接管并引导车辆到一个可用的停车位。本例着重于通过环境规划一条可行路径,从该路径生成一条轨迹,并使用可行控制器执行该轨迹。这个例子中不包括地图创建和动态避障。
在仿真之前,helperSLCreateCostmap函数在PreLoadFcn模型的回调函数。回调函数的使用请参见模型回调(万博1manbetx模型)这个helperSLCreateCostmap函数用于创建停车场的静态地图,其中包含有关静止障碍物、道路标记和停放车辆的信息。该地图表示为一个vehicleCostmap
使用vehicleCostmaphelperSLCreateUtilityStruct函数将vehicleCostmap

全局路线计划被描述为一系列要穿过的车道段,以到达停车位PreLoadFcn模型的回调函数加载一个路由计划,该计划存储为一个表。该表指定了管段的开始和结束姿势,以及管段的特性,例如速度限制。
routePlan=5×3表格起始端位属性(uuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuu0 0 1×1结构体70 70 90 1×1结构体70 32 90 38×1.53

本例中许多块的输入和输出是Simulink总线(万博1manbetx万博1manbetx模拟总线(万博1manbetx模型)PreLoadFcn模型的回调函数helperSLCreateUtilityBus函数创建这些总线。

规划是一个分层的过程,每个连续的层负责一个更细粒度的任务。行为层[1]位于这个堆栈的顶部。的行为计划块通过为全局路径规划提供一个中间目标和配置来触发一个导航任务序列运动规划和轨迹生成块。每个路径段使用以下步骤导航:
运动规划:使用最佳快速探索随机树(RRT*)算法通过环境地图规划可行路径(
路径规划者车辆控制:
HelperPathAnalyzer为控制车辆转向和速度的车辆控制器子系统提供参考信号。目标检测:检查车辆是否达到了使用部分的最后姿势
helperGoalChecker.
探索子系统
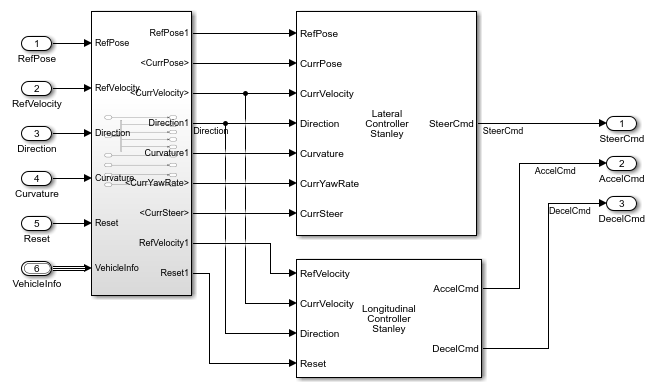
车辆控制器子系统包含一个横向控制器Stanley块和a纵向控制器Stanley分别调节挡块的姿态和速度。为了处理真实的车辆动力学[3],汽车模型参数设置为动态自行车模型.在这种配置下,需要额外的输入,如路径曲率、车辆当前的横摆率和当前的转向角度来计算转向指令。纵向控制器Stanley块使用一个切换比例积分控制器来计算加速和减速命令,以启动车辆的刹车和油门。
为了演示性能,将车辆控制器应用于车辆模型块,该模型块包含一个简化的转向系统[3],该转向系统被建模为一阶系统和车身三维自由度(车辆动力学Blockset)自动驾驶工具箱之间共享的块™ 和车辆动力学区块集™. 与本项目中使用的运动学自行车模型进行了比较自动停车员以MATLAB®为例,该车辆模型块更精确,因为它考虑了惯性效应,如轮胎打滑和转向伺服驱动。

仿真结果
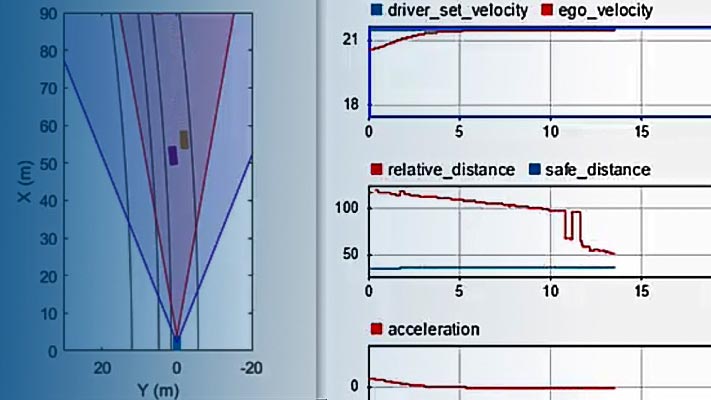
可视化块显示了车辆如何跟踪参考路径。它还显示车辆的速度和转向指令在一个范围内。下面的图片是这个例子的模拟结果:

模拟在45秒左右停止,即车辆到达目的地时。

结论
此示例演示如何在Simulink中实现自动泊车代客泊车。万博1manbetx
工具书类
Buehler, Martin, Karl Iagnemma和Sanjiv Singh。DARPA城市挑战:城市交通中的自动驾驶车辆(第1版)。斯普林格出版公司,注册成立,2009年。
[2] Lepetic、Marko、Gregor Klancar、Igor Skrjanc、Drago Matko和Bostjan Potocnik,“考虑加速度限制的时间最优路径规划。”机器人技术与自主系统,第45卷,2003年第3-4期,第199-210页。
Hoffmann, Gabriel M., Claire J. Tomlin, Michael Montemerlo和Sebastian Thrun。《越野驾驶自动汽车轨迹跟踪:控制器设计、实验验证与竞赛》。美国控制会议, 2007, pp. 2296-2301。
另请参阅
阻碍
- 车身三维自由度(车辆动力学Blockset)|横向控制器Stanley|路径平滑样条|纵向控制器Stanley|速度剖面仪
对象
相关话题
您还可以从以下列表中选择网站: