控制系统建模与模型对象
模型对象可以表示控制结构的各个部件,如植物,致动器,传感器,或控制器。可以连接模型对象来构建框图表示多个元件的组合响应的聚集体的模型。
例如,下面的控制系统包含预滤器F, 植物G和控制器C,布置在单环配置。该模型还包括传感器动力学的表示,小号。
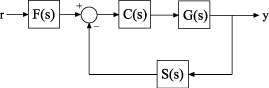
你可以代表每一个组件模型对象。你并不需要使用相同类型的模型对象的每个组件。例如,表示所述植物G作为零极点增益(ZPK)模型与双刀小号= -1;C为PID控制器,和F和小号作为传递函数:
G = ZPK([],[ - 1,-1],1);C = PID(2,1.3,0.3,0.5);S = TF(5,[1〜4]);F = TF(1,[1 1]);
然后,您可以将这些元素构建的模型,代表你的控制系统或控制系统作为一个整体。例如,创建的开环反应SGC:
open_loop = S * G * C;
要构建未过滤的闭环响应模型,使用反馈命令:
T =反馈(G * C,S);
为了模拟从整个闭环系统的响应[R至ÿ,结合Ť与滤波器的传递函数:
尝试= T * F;
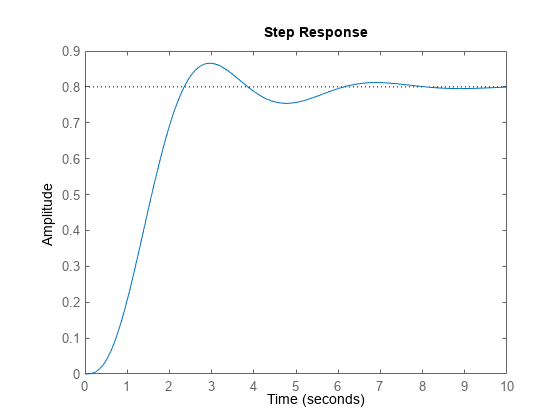
结果开环,Ť和尝试也是线型的模型对象。你可以用控制系统工具箱™控制的设计和分析的命令对它们进行操作。例如,绘制了整个系统的阶跃响应:
stepplot(TRY)
当你把数字LTI模型,所得到的数字LTI模型代表的总系统。将得到的模型不会保留从组合部件的原始数据。例如,Ť不单独跟踪组件的动态G,C和小号该组合创建Ť。
也可以看看
相关的例子
更多关于
您还可以选择从下面的列表中的网站:
