调整控制系统及其过度
这Systune.无论其架构和反馈循环数如何,命令都可以共同调整控制系统的收益。此示例概述了Systune.在简单的应用程序上的工作流程。
头磁盘组件控制
此示例在硬盘驱动器中使用头磁盘组件(HDA)的第9个阶模型。此模型捕获HDA中的前几种灵活模式。
加载rctexamples.GBODE(G),网格

我们使用下面显示的反馈循环将头部位于正确的轨道上。该控制结构包括PI控制器和返回路径中的低通滤波器。头部位置y应该跟踪一步变化R.响应时间约为1毫秒,很少或没有过冲,没有稳态误差。

图1:控制结构
您可以使用Systune.直接调整PI增益和滤波器系数
受各种时间和频域要求的影响。
指定可调元素
图1的控制结构中有两个可调元素:PI控制器 和低通滤波器
你可以使用调音对象以参数化PI块:
c0 =调谐('C'那'pi');%调谐pi.
参数化低通滤波器 ,创建可调谐real参数 并使用分子构造一阶传递函数 和分母 :
a = REAMP('一种',1);%滤波器系数f0 = tf(a,[1 a]);%过滤器由a参数化
看看“建立可调式模型”用于可用可调元素的概述示例。
构建可调闭环模型
接下来构建图1中的反馈回路的闭环模型。为了便于开环分析并指定诸如所需稳定性边距的开环要求,请在工厂输入中添加分析点你:
AP = Analysispoint('U');

图2:分析点块
采用回馈从参考构建闭环传输的模型R.到头位置y:
T0 =反馈(G * AP * C0,F0);从r到y的%闭环传输t0.inputname =.'r';t0.outputname =.'是';
结果T0.是广义的状态空间模型(雄鸡)取决于可调元素
和
。
指定设计要求
这TuningGoal.包装包含各种控制设计要求,用于指定控制系统的所需行为。这些包括对响应时间,确定性和随机增益,环形,稳定性边缘和杆位置的要求。在这里,我们使用两个要求来捕获控制目标:
跟踪要求:位置
y应该跟踪参考R.有1毫秒的响应时间稳定性保证金要求:反馈回路应具有6dB的增益余量和45度的相位余量
使用TuningGoal.Tracking.和TuningGoal.Margins.对象以捕获这些要求。注意,边距要求适用于在工厂输入中测量的开环响应你(由分析点标记的位置AP)。
req1 = tuninggoal.tracking('r'那'是',0.001);req2 = tuninggoal.margins('U',6,45);
调整控制器参数
你现在可以使用Systune.调整PI增益和滤波器系数
。此功能采用可调闭环模型T0.和要求REQ1,REQ2.。使用一些随机的起点来改善全局最优设计的机会。
RNG('默认')选项= systuneOptions('OrmyStart',3);[t,fsoft] = systune(t0,[req1,req2],选项);
final:soft = 1.35,硬= -inf,迭代= 65 final:soft = 1.35,硬= -inf,迭代= 106 final:soft = 2.78e + 03,硬= -inf,迭代= 171一些闭环杆略微稳定(衰减率接近1E-07)Final:Soft = 1.35,硬= -Inf,迭代= 64
所有要求都是归一化的,因此当其值小于1.此处时,最终值略大于1,表明该要求几乎满足。使用输出FSOFT.查看每个要求的调谐值。在这里,我们看到第一个要求(跟踪)在满足第二个要求(边距)时略微违反。
FSOFT.
Fsoft =1×21.3461 0.6326
第一个输出T.的Systune.是“调谐”闭环模型。采用展示要么getblockvalue.要访问PI增益和滤波器系数的调谐值:
getblockValue(t,'C')PI控制器的%调谐值
ans = 1 kp + ki * --- s用kp = 0.00104,ki = 0.0122名称:C连续时间PI控制器并行形式。
展示(t)所有可调元素的%调谐值
C = 1 kp + ki * ---带有kp = 0.00104,ki = 0.0122名称:C连续时间PI控制器并行形式。------------------------------ a = 3.19e + 03
验证结果
首次使用viewgoal.检查调谐系统如何针对每个要求进行。第一个图表显示了作为频率函数的跟踪误差,第二个图显示了常规磁盘边距作为频率的函数(参见diskmargin.)。看看“创造设计要求”详情示例。
CLF,ViewGoal([req1 req2],t)

接下来绘制引用的闭环步骤响应R.到头位置y。响应没有过冲,但摇摆不定。
CLF,步骤(t)

要进一步调查,使用getLooptransfer.在工厂输入中获取开环响应。
l = getlooptransfer(t,'U');BODE(L,{1E3,1E6}),网格标题('开环响应')
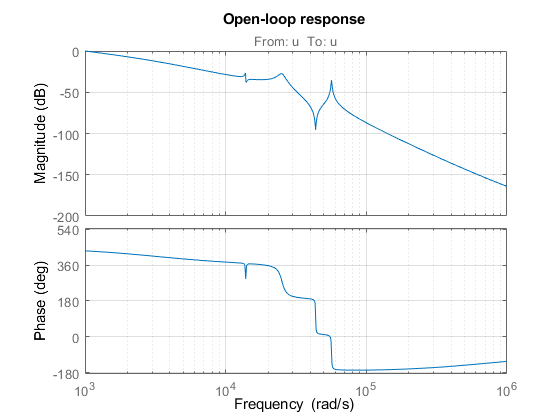
摆动是由于增益交叉后的第一个共振。要消除它,您可以将凹口滤波器添加到反馈循环,并将其系数与低通系数和PI获得使用Systune.。
也可以看看
Systune.|TuningGoal.Margins.|TuningGoal.Tracking.
相关话题
您还可以从以下列表中选择一个网站:
