vehicleDetectorACF
使用聚合信道特征载重车辆检测器
描述
探测器= vehicleDetectorACFacfObjectDetector对象正在使用的前,后,左的未被遮挡图像,并且所述车辆的左右两侧的培训。
例子
检测车辆的图像
装载车辆预先训练的探测器
检测器= vehicleDetectorACF(“前后视”);
加载图像,并运行检测器。
I = imread('highway.png');[bboxes,分数] =检测(检测器,I);
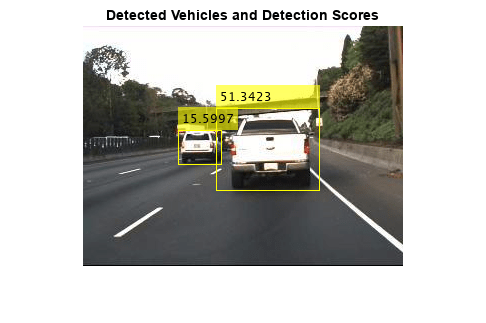
覆盖边界框和得分的车辆在图像中检测。
I = insertObjectAnnotation(I,'长方形',bboxes,分数);图imshow(I)称号(“检测到的车辆和检测分数”)
输入参数
输出参数
介绍了在R2017a
您还可以选择从下面的列表中的网站:
