ROILabelData
描述
的ROILabelData对象存储地面实况数据感兴趣的区域(ROI)为每个信号在一个标签定义groundTruthMultisignal对象。
创建
当你出口groundTruthMultisignal对象从一个地面实况贴标签机应用程序会话,ROILabelData出口对象的属性存储ROI是一个标签ROILabelData对象。创建一个ROILabelData对象编程,使用vision.labeler.labeldata.ROILabelData函数(这里描述)。
描述
roiLabelData= vision.labeler.labeldata.ROILabelData (signalNames,labelData)roiLabelData,包含属性中列出的信号名称signalNames。这些属性指定的存储相应的ROI标签数据labelData。
输入参数
signalNames- - - - - -信号的名字
字符串数组
信号名称指定为一个字符串数组。指定的名称出现在所有信号groundTruthMultisignal您正在创建的对象。你可以从现有的信号名称groundTruthMultisignal对象通过访问数据源该对象的属性。使用此命令和替换gTruth与你的名字groundTruthMultisignal对象变量。
gTruth.DataSource.SignalName
在一个出口groundTruthMultisignal对象,ROILabelData对象包含一个标签为每个信号数据属性,即使一些信号没有ROI标签数据。
创建的属性ROILabelData对象指定的名称signalNames。
例子:[" video_01_city_c2s_fcw_10s”“lidarSequence”)
labelData- - - - - -ROI每个信号标签数据
单元阵列的时间表
ROI每个信号,标签数据指定为一个单元阵列的时间表。每个单元阵列中的时间表包含数据的信号在相应的位置signalNames输入。的ROILabelData对象存储每个时间表的属性名称相同的信号。
时间表取决于数据格式为每个信号groundTruthMultisignal对象,导出或创建。
每个时间表包含一列定义存储在每个标签LabelDefinitions财产的groundTruthMultisignal对象。标签定义信号类型不支持被排除在外。万博1manbetx例如,假设您定义一个行ROI标签命名“车道”。激光雷达点云的时间表不包括一个信号车道列,因为这些信号不支持万博1manbetx行ROI标签。在数据源财产的groundTruthMultisignal对象,SignalType每个数据源的属性列表有效信号类型。
时间表的高度是定义的数字时间戳的信号。在数据源财产的groundTruthMultisignal对象,时间戳每个数据源的属性列表信号时间戳。
为每个标签定义,所有ROI标签标记在那个表中时间戳被组合到一个细胞。考虑到ROI标签为视频信号存储在一个数据groundTruthMultisignal对象,gTruth。在每个时间戳,车包含三个标签,卡车包含一个标签,车道包含两个标签。
gTruth.ROILabelData.video_01_city_c2s_fcw_10s
ans = 5×4时间表时间汽车卡车巷_____ _______ _______ _______ 0秒{3×4双}{1×4双}}{2×1细胞0.05秒{3×4双}{1×4双}}{2×1细胞0.1秒{3×4双}{1×4双}}{2×1细胞0.15秒{3×4双}{1×4双}}{2×1细胞0.2秒{3×4双}{1×4双}{2×1细胞}
ROI标签数据的存储格式取决于类型的标签。
| 标签类型 | 存储格式的标签在每一个时间戳 |
|---|---|
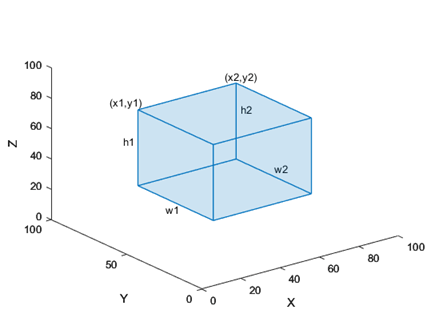
labelType.Rectangle |
|
|
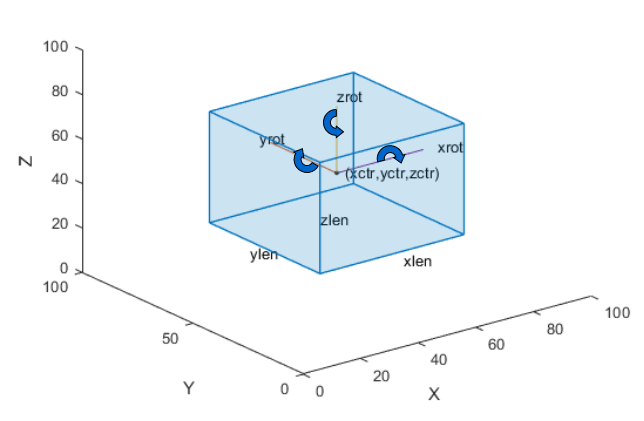
图中显示这些值如何确定一个长方体的位置。
|
|
图中显示这些值如何确定一个长方体的位置。
|
labelType.Line |
|
labelType.PixelLabel |
标签数据的所有像素标签定义存储在一个单一的米1 |
labelType.Polygon |
|
labelType.Custom |
标签中指定的存储完全按照他们的时间表。如果你导入一个 |
如果数据包括sublabels ROI标签或属性,那么必须指定为标签在每个时间戳结构。结构包括这些字段。
| 标签结构字段 | 描述 | ||||||
|---|---|---|---|---|---|---|---|
位置 |
父标签的位置在给定的时间戳 的格式 |
||||||
AttributeName1,…, AttributeNameN |
父标签的属性 每个sublabel定义有自己的字段,字段的名称对应于属性名称。的属性值是一个特征向量 |
||||||
SublabelName1,…, SublabelNameN |
Sublabels父标签 每个sublabel定义有自己的字段,字段的名称对应于sublabel名字。每个sublabel字段的值是一个结构,它包含所有的数据标记sublabels这个名字在给定的时间戳。 此表描述了这个sublabel结构的格式。
|
属性
例子
版本历史
介绍了R2020a