dsp.AffineProjectionFilter
计算输出,错误和使用仿射投影(AP)算法的系数
描述
该dsp.AffineProjectionFilter系统对象™滤波器使用AP滤波器实现中,输入的各信道。
以过滤输入的每个信道:
创建
dsp.AffineProjectionFilter对象并设置其属性。调用带参数的对象,就好像它是一个功能。
要了解更多有关系统对象的方式工作,请参阅什么是系统对象?(MATLAB)。
创建
句法
属性
用法
描述
输入参数
输出参数
对象函数
使用对象函数,指定系统对象作为第一个输入参数。例如,为了释放一个名为System对象的系统资源OBJ,使用以下语法:
释放(OBJ)
例子
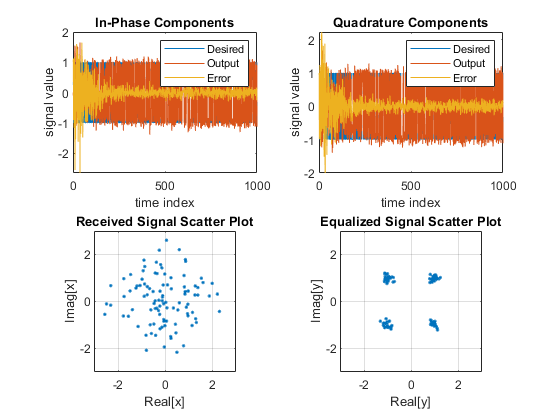
正交相移编码自适应均衡
注意:如果您使用R2016a或更早版本,取代每次调用该对象具有同等一步句法。例如,OBJ(x)的变步骤(OBJ,x)的。
QPSK自适应均衡使用32系数的FIR滤波器(1000次迭代)
d = 16;延迟的样本的数量%b = exp(1i*pi/4)*[-0.7 1];信道的%分母系数A = [1 -0.7];信道的%分母系数正常= 1000关系;迭代的数量%S =符号(randn(1,NTR + d))+ 1I *符号(randn(1,NTR + d));%的基带信号N = 0.1 *(randn(1,NTR + d)+ 1I * randn(1,NTR + d));%的噪声信号R =滤波器(B,A,S)+ N;%接收信号X = R(1 + d:NTR + d);%输入信号(接收信号)d = s(1:正常)关系;%期望信号(延迟QPSK信号)亩= 0.1;% 步长PO = 4;%投影秩序偏移量= 0.05;%的偏移量协方差矩阵apf = dsp.AffineProjectionFilter ('长度',32,...'步长'亩,'ProjectionOrder',PO,...“InitialOffsetCovariance”,抵消);(y, e) = apf (x, d);次要情节(2 2 1);阴谋(1:正常,关系真实([d; y; e]));标题(“相分量”);传奇(“所需的”,“输出”,'错误');xlabel(“时间指数”);ylabel(“信号值”);副区(2,2,2);图(1:NTR,IMAG([d; Y; E]));标题(“正交分量”);传奇(“所需的”,“输出”,'错误');xlabel(“时间指数”);ylabel(“信号值”);副区(2,2,3);积(X(NTR-100:NTR),'');轴([ - 3 3 -3 3]);标题(“接收信号散点图”);轴('广场');xlabel('真正的[X]');ylabel(图像放大[x]”);网格上;副区(2,2,4);情节(Y(NTR-100:NTR),'');轴([ - 3 3 -3 3]);标题(“均衡的信号散点图”);轴('广场');xlabel('真正的[Y]');ylabel('的Imag [Y]');网格上;
FIR滤波器的系统辨识仿射投影滤波
注意:如果您使用R2016a或更早版本,取代每次调用该对象具有同等一步句法。例如,OBJ(x)的变步骤(OBJ,x)的。
公顷= FIR1(31,0.5);冷杉= dsp.FIRFilter('分子',哈);FIR%系统识别IIR = dsp.IIRFilter('分子',SQRT(0.75),...“分母”[1 -0.5]);X = IIR(符号(randn(2000,25)));N = 0.1 * randn(大小(X));%观察噪声信号d =冷杉(x) + n;%期望信号L = 32;%滤波器长度亩= 0.008;%仿射投影滤波器的步长。M = 5;%抽取因子分析%和仿真结果APF = dsp.AffineProjectionFilter(1,1-'步长'μ);[simmse, meanWsim Wsim traceKsim] = msesim (apf, x, d, m);情节(m *(1:长度(simmse)), 10 * log10 (simmse));xlabel(“迭代”);ylabel('MSE(分贝)');标题(“的仿射投影滤波器学习曲线在系统识别使用的”)

算法
仿射投影算法(APA)是一种基于多个输入向量估计未知系统的自适应算法[1]。它的目的是提高其他自适应算法的性能,主要是那些基于LMS。仿射投影算法重用导致当输入信号具有高度相关性快速收敛的旧数据,导致一个家庭的算法,可以使计算复杂度之间的权衡与收敛速度[2]。
下面的方程描述了用于设计AP滤波器的概念算法:
哪里C或者是ε一世如果初始偏移协方差是一个标量ε,或[R如果初始偏移协方差是一个矩阵[R。该变量如下:
| 变量 | 描述 |
|---|---|
| ñ | 当前时间指数 |
| u (n) | 在步骤输入样本ñ |
| ü美联社(n) | 最后一个矩阵大号1个输入信号矢量 |
| w ^(n) | 自适应滤波器系数向量 |
| Y(N) | 自适应滤波器输出 |
| d(n)的 | 所需的信号 |
| E(N) | 在步骤错误ñ |
| 大号 | 投影顺序 |
| ñ | 过滤器的顺序(即。,过滤长度=ñ+ 1) |
| μ | 步长 |
参考文献
[1] K.大关,T.梅田,“自适应滤波算法使用正交投影到一个子空间仿射及其性质”,电子。Commun。日本。67-A(5), 1984年5月,第19-27页。
[2]保罗S. R.迪尼兹,自适应滤波:算法和实际实施,第二版。波士顿:Kluwer学术出版社,2002。
扩展功能
介绍了在R2013a
您还可以选择从下面的列表中的网站: