initrpekf
等速范围-参数EKF初始化
句法
描述
过滤= initrpekf(发现)
的范围内,参数扩展的卡尔曼滤波器(RPEKF)是一个高斯累加滤波器(trackingGSF)具有多个EKFs,每个在所述目标的估计范围初始化。范围参数化是一种常用的技术来从仅角度检测初始化的滤波器。
过滤= initrpekf(发现,numFilters)
过滤= initrpekf(发现,numFilters,rangeLimits)
例子
初始化RPEKF从角度,只有检测和可视化过滤器
所述RPEKF是一种特殊类型的过滤器,可以只使用角的测量被初始化,即,方位角和/或仰角的。当。。。的时候'帧'设定为'球形'和'HasRange'设定为'假'中,检测具有[方位角仰角]测量。适当地指定测量参数来定义与无范围的信息的唯一角度测量。
measParam =结构('帧','球形','HasRange',假,'OriginPosition'[100; 10; 0]);
该objectDetection类定义由传感器测得的角度仅检测的接口。该MeasurementParameters现场objectDetection携带关于什么传感器测量的信息。
检测= objectDetection(0,[30; 30],'MeasurementParameters',measParam,'MeasurementNoise',2 *眼(2));
该initrpekf函数使用仅角检测初始化RPEKF。
rpekf = initrpekf(检测)%#好
rpekf = trackingGSF具有属性:状态:[6X1双] StateCovariance:[6x6的双] TrackingFilters:{6X1细胞} ModelProbabilities:[6X1双] MeasurementNoise:[2×2双]
也可以用10层的过滤器初始化RPEKF并[1000 10000]方案单元的范围限制内操作。
rangeLimits = [1000 10000];numFilters = 10;rpekf = initrpekf(检测,numFilters,rangeLimits)
rpekf = trackingGSF具有属性:状态:[6X1双] StateCovariance:[6x6的双] TrackingFilters:{10×细胞} ModelProbabilities:[10×双] MeasurementNoise:[2×2双]
您也可以指定initrpekf功能作为FilterInitializationFcn到trackerGNN宾语。
funcHandle = @(检测)initrpekf(检测,numFilters,rangeLimits)
funcHandle =与价值function_handle:@(检测)initrpekf(检测,numFilters,rangeLimits)
跟踪= trackerGNN('FilterInitializationFcn',funcHandle)
跟踪= trackerGNN与属性:TrackerIndex:0 FilterInitializationFcn:[function_handle]赋值: 'MatchPairs' AssignmentThreshold:[30 Inf文件] MaxNumTracks:100个MaxNumSensors:20 TrackLogic: '历史' ConfirmationThreshold:[2 3] DeletionThreshold:[5 5] HasCostMatrixInput:假HasDetectableTrackIDsInput:假StateParameters:[1x1的结构] NumTracks:0 NumConfirmedTracks:0
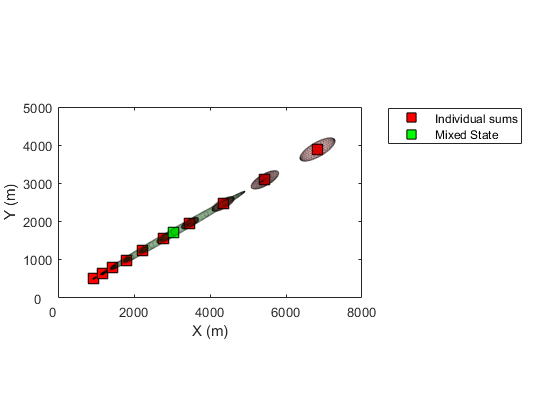
可视化的过滤器。
TP = theaterPlot;componentPlot = trackPlotter(TP,'显示名称',“个人的款项”,'MarkerFaceColor','R');sumPlot = trackPlotter(TP,'显示名称',“混合态”,'MarkerFaceColor','G');indFilters = rpekf.TrackingFilters;POS =零(numFilters,3);COV =零(3,3,numFilters);对于I = 1:numFilters POS(I,:) = indFilters {I} .STATE(1:2:结束);COV(1:3,1:3,1)= indFilters {I} .StateCovariance(1:2:结束,1:2:结束);结束componentPlot.plotTrack(POS,COV);mixedPos = rpekf.State(1:2:结束)';mixedPosCov = rpekf.StateCovariance(1:2:结束,1:2:结束);sumPlot.plotTrack(mixedPos,mixedPosCov);
输入参数
输出参数
参考
[1]桃,N“轴承只使用一组范围,参数化扩展卡尔曼滤波器跟踪。“IEE论文集-控制理论与应用142,第1期(1995):73-80。
扩展功能
介绍了在R2018b
您还可以选择从下面的列表中的网站: