wiener2
二维自适应去噪滤波
的语法wiener2 (n [m], [mblock nblock],噪音)被移除。使用wiener2(我,(mn)、噪音)语法。
描述
例子
通过自适应滤波去除噪声
这个例子展示了如何使用wiener2函数应用维纳滤波器(一种线性滤波器)到一个图像自适应。维纳滤波器裁缝本身到本地图像方差。方差大,wiener2执行平滑。在方差很小,wiener2执行更平滑。
这种方法通常会产生更好的结果比线性过滤。自适应滤波器比类似的线性滤波器,选择性保留边缘和其他图像的高频部分。此外,没有设计任务;的wiener2函数处理所有初步计算和实现滤波器的输入图像。wiener2然而,确实需要更多的计算时间比线性过滤。
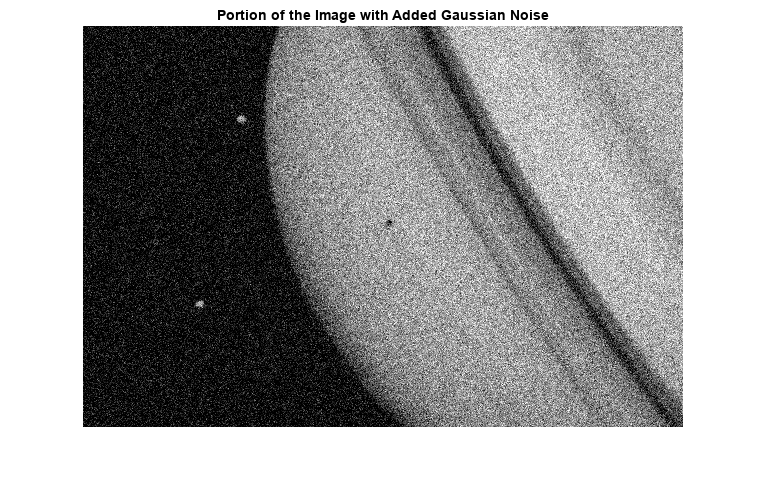
wiener2效果最好,当噪声恒功率(“白”)加性噪声,如高斯噪声。下面的例子适用wiener2土星与添加高斯噪声的图像。
读取图像到工作区中。
RGB = imread (“saturn.png”);
真彩图像转换成灰度。
I = im2gray (RGB);
添加高斯噪声图像
J = imnoise(我“高斯”,0,0.025);
嘈杂的图像显示。因为图像是相当大的,只显示图像的一部分。
imshow (J (600:1000 1:6));标题(的部分添加高斯噪声的图像);
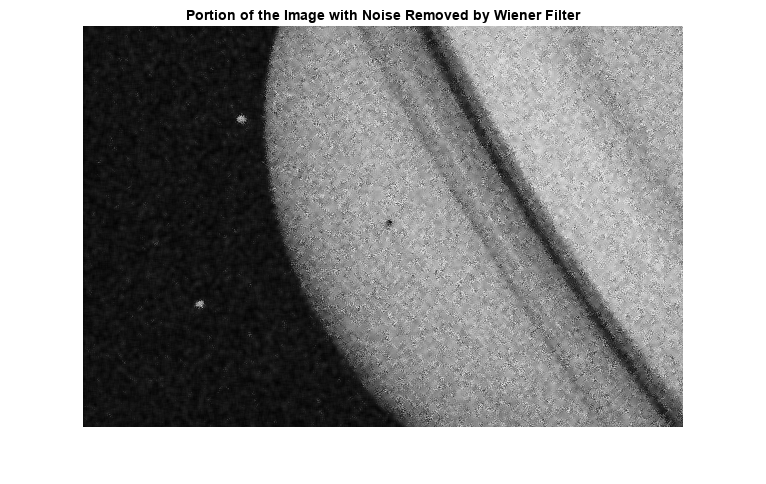
消除噪音使用wiener2函数。
K = wiener2 (J [5 5]);
处理过的图像显示。因为图像是相当大的,只显示图像的一部分。
图imshow (K (600:1000 1:6));标题(的部分图像噪声去除维纳滤波器的);
输入参数
输出参数
算法
wiener2估计每个像素周围的局部均值和方差。
和
在哪里
是N——- - - - - -米附近的图像中每个像素一个。wiener2然后创建一个pixelwise维纳滤波器使用这些估计,
ν的地方2噪声方差。如果没有,噪声方差wiener2使用当地所有的估计方差的平均值。
引用
[1]Lim Jae年代。二维信号和图像处理恩格尔伍德悬崖,新泽西,普伦蒂斯霍尔,1990年,p。548年,方程9.44,9.45和9.46。