激光雷达贴标机
LIDAR点云中的标签地面真理数据
描述
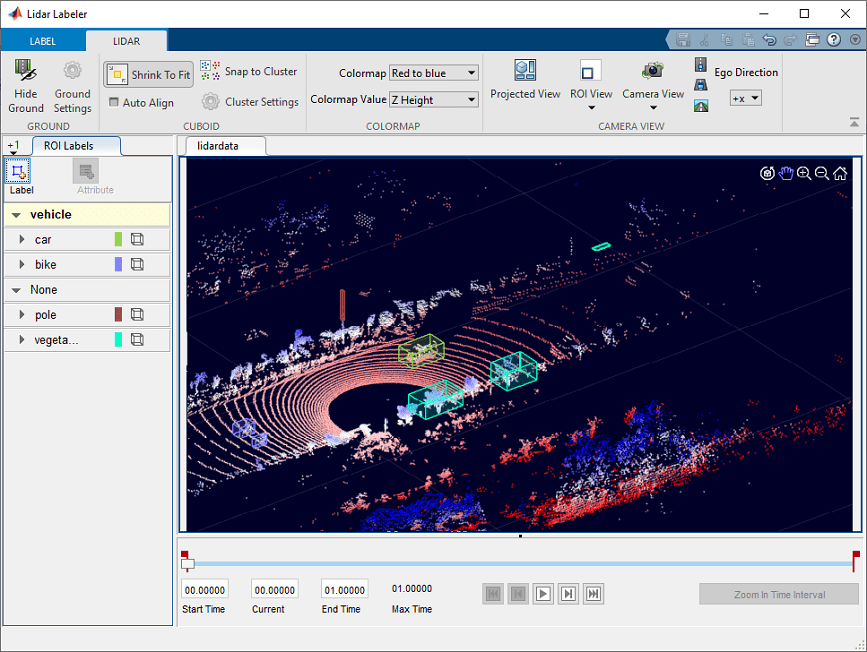
这个激光雷达贴标机应用程序允许您标记点云或点云序列中的对象。该应用程序从PLY、PCAP、LAS、LAZ、ROS和PCD文件中读取点云数据。使用该应用程序,您可以:
定义感兴趣的长方体区域(ROI)标签和场景标签。使用它们以交互方式标记您的地面真理数据。
定义标签的属性,并使用它们提供有关标签的更多详细信息。
使用内置算法进行聚类,接地平面分段,自动标签和跟踪。
将标签定义,点云数据和地面真理数据保存到会话文件以供将来使用。
使用预计视图可同时在俯视图、前视图和侧视图中查看标签的选项。
使用摄像机视图用于创建和重用点云数据的自定义视图的选项。
使用自动对齐选项旋转长方体并使其最适合簇。
使用
lidar.syncImageViewer.syncImageViewer类将应用程序同步到外部可视化或分析工具。编写、导入并使用自定义自动算法进行自动标记。
使用视觉摘要评估标签自动化算法的性能。
将标签的地面真理导出为一个
地老虎目的。该对象可用于系统验证和培训对象检测器。
要了解有关此应用的更多信息,请参阅开始使用激光雷达贴标机.
打开激光雷达贴标机应用程序
MATLAB®工具条:在应用程序选项卡,在下面图像处理与计算机视觉,单击“应用”图标。
matlab命令提示符:输入
Lidarlabeler..
程序化使用
限制
标签不支持子标签。万博1manbetx
“标签摘要”窗口不支持子标签。万博1manbetx
更多关于
ROI标签和属性
在应用程序的左侧ROI标签窗格包含可以在点云框架上标记的ROI标签定义。可以直接从此窗格创建标签定义。或者,可以使用LabeldefinitionCreatorlidar.对象,然后将这些标签定义导入到应用程序会话中。
该应用程序支持R万博1manbetxOI标签和属性的定义。
一ROI标签是与信号帧中的ROI相对应的标签。此表介绍了支持的标签类型。万博1manbetx
| ROI标签 | 描述 | 例子 |
|---|---|---|
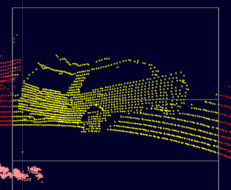
长方体 |
在对象周围绘制立方体投资回报标签。 |
|

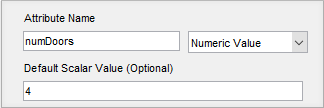
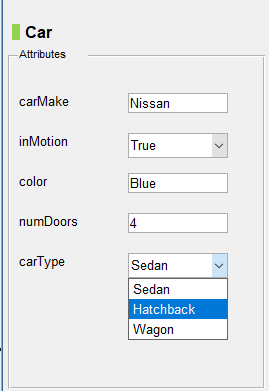
一ROI属性指定有关ROI标签的其他信息。例如,在驾驶场景中,属性可以包括车辆的类型或颜色。此表介绍了支持的属性类型。万博1manbetx
| 属性类型 | 示例属性定义 | 示例默认值 |
|---|---|---|
|
|
|
|
|
|
|
|
|
|
|


提示
使用
lidar.syncImageViewer.syncImageViewer类创建用于查看与点云数据对应的图像的工具。删除接地平面以清楚地查看创建的对象标签。
绘制长方体后,使用“旋转”、“平移”、“展开”和“收缩”选项编辑长方体。
使用摄像机视图选项保存当前角度和方向的数据视图。
为避免使用新标签重新标记实际真理,请在开始标记您的地面真理之前组织您要使用的标签方案。
您可以复制并粘贴在相同类型的信号之间的标签。
算法
您还可以从以下列表中选择一个网站: