主要内容
pcmatchfeatures
查找点云之间的匹配特征
语法
描述
[___) = pcmatchfeatures (___,除了前面语法中的参数组合外,还使用一个或多个名称-值对参数指定选项。例如,名称、值)“匹配阈值”,0.03设置特征匹配的归一化距离阈值为0.03.
例子
匹配点云对应的特征
此示例演示如何使用pcmatchfeatures作用
预处理
将点云数据读入工作区。
ptCld=pcread(“茶壶,铺层”);
向下采样点云。
ptCloud=pcdownsample(ptCld,“网格平均”,0.05);
使用变换矩阵变换并创建一个新的点云A..
A = [cos(/6) sin(/6) 0 0;...-sin(/6) cos(/6) 0 0;...0 0 1 0;...5 5 10 1];tform = affine3d(一个);ptCloudTformed = pctransform (ptCloud tform);
将两点云可视化。
pcshowpair (ptCloud ptCloudTformed);传奇(“原始”,“转化”,“输入TextColor”, (1 1 0));
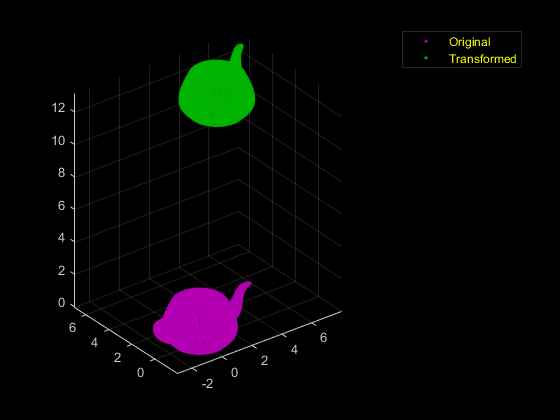
匹配相应的功能
在预处理部分,我们通过平移和旋转原始点云来创建第二个点云。在本节中,我们使用pcmatchfeatures函数以查找这些点云之间的匹配特征。
使用特征提取作用
fixedFeature = extractFPFHFeatures (ptCloud);movingFeature = extractFPFHFeatures (ptCloudTformed);长度(movingFeature)
ans=16578
找到匹配特性。
[matchingPairs,分数]= pcmatchfeatures (fixedFeature、movingFeature ptCloud, ptCloudTformed);长度(matchingPairs)
ans = 3414
分数接近零意味着算法对匹配有信心,反之亦然。使用。计算所有匹配的平均分数分数向量。
平均(分数)
ans = 0.0017
输入参数
输出参数
参考文献
[1] 穆哈、马吕斯和大卫·G·洛。“具有自动算法配置的快速近似近邻。”中第四届计算机视觉理论与应用国际会议论文集, 331 - 40。葡萄牙里斯本:科学出版社-科学技术出版物,2009。https://doi.org/10.5220/0001787803310340。
[2] 周、钱毅、杰斯克公园和弗拉德伦·科尔顿。“快速全球注册”,中文版欧洲计算机视觉会议,第766-782页。湛斯普林格,2016年。
扩展能力
在R2020b中引入
你也可以从以下列表中选择一个网站: