主要内容
navPath
计划路径
描述
的navPath对象存储路径通常是由几何路径规划。路径点作为状态存储在一个关联的状态空间。
创建
描述
路径= navPath路径用默认设置,使用SE2状态空间。
路径= navPath (空间)空间。的空间输入设置的值StateSpace财产。
路径= navPath (空间,州)州。指定州作为一个矩阵的样本。以外的国家StateBounds国家的空间对象范围。的州输入设置的值州财产。
属性
例子
创建navPath基于多个锚点
创建一个navPath对象基于多个中转地点一个杜宾空间。
dubinsSpace = stateSpaceDubins ([0 25;0 25;π-π)
dubinsSpace = stateSpaceDubins属性:SE2属性名称:“SE2杜宾的StateBounds:[3×2双]NumStateVariables: 3 MinTurningRadius杜宾车辆属性:1
pathobj = navPath (dubinsSpace)
pathobj = navPath属性:StateSpace: [1×1 stateSpaceDubins]:[0×3双]NumStates: 0
路点= […8 10π/ 2;10 12π/ 4;12 17π/ 2;11 10 -π);追加(pathobj锚点);
插入路径,它包含了250点。
插入(pathobj, 250)
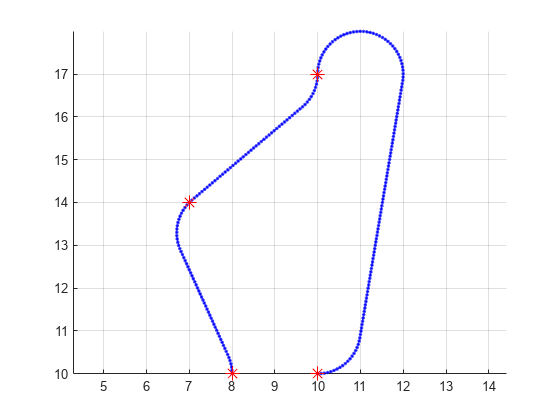
可视化插值路径和原来的锚点。
图;网格在;轴平等的;持有在;情节(pathobj.States (: 1) pathobj.States (:, 2),“。b”);情节(锚点(:1),锚点(:,2),“* r”,“MarkerSize”,10)
计算路径的长度。
len =通路长度(pathobj);disp ("路径长度= "+ num2str (len))
路径长度= 19.37
介绍了R2019b