分阶段。CFARDetector2D
二维CFAR探测器
描述
分阶段。CFARDetector2DSystem object™为二维图像数据的选定元素(称为单元格)实现恒定误报率检测器(CFAR)。当图像单元值超过阈值时声明检测。为了保持一个恒定的虚警率,阈值设置为图像噪声功率的倍数。检测器估计被测细胞的噪声功率(减少)使用三种单元格平均方法中的一种或顺序统计方法从周围的单元格中提取。细胞平均法有细胞平均法(CA)、最大细胞平均法(GOCA)和最小细胞平均法(SOCA)。
对于每个测试单元,检测器:
从围绕CUT单元的训练频带中的单元值估计噪声统计量。
通过将噪声估计值乘以阈值因子来计算阈值。
将CUT单元格值与阈值进行比较,以确定目标是否存在。如果该值大于阈值,则存在目标器。
运行探测器
请注意
或者,不使用一步方法来执行System对象定义的操作,则可以带参数调用该对象,就好像它是一个函数一样。例如,Y = step(obj,x)和Y = obj(x)执行等价操作。
建设
探测器=分阶段。CFARDetector2D探测器.
探测器=分阶段。CFARDetector2D (名字,价值)探测器,使用每个指定的属性名字设置为指定的价值.您可以以任意顺序指定附加的名称-值对参数,如(Name1,Value1、……以,家)。
属性
例子
为纯噪声数据设置二维CFAR阈值
这个示例展示了如何根据所需的虚警概率(pfa)设置二维CFAR阈值。
注意:您可以用等效函数替换对该函数的每次调用一步语法。例如,替换myObject (x)与步骤(myObject x).
在包含高斯噪声的41 × 41细胞矩阵上执行细胞平均CFAR检测。估计经验pfa,并将其与所需的pfa进行比较。为了得到一个好的估计,在1000个相似的矩阵上执行这个模拟。首先,使用所需的pfa设置阈值。在这种情况下,没有目标,pfa可以从超过阈值的细胞数量中估计出来。假设数据是通过平方律检测器处理的,并且没有进行脉冲积分。使用宽度为3单元格,高度为4单元格的训练单元格带。使用宽度为3个单元格,高度为2个单元格的保护带将测试单元格(CUT)与训练单元格分开。指定所需的pfa为5.0e-4。
P = 5e-4;rs = RandStream.create(“mt19937ar”,“种子”5);N = 41;Ntrials = 1000;检测器=相位。CFARDetector2D (“TrainingBandSize”3],[4日,…“ThresholdFactor”,“汽车”,“GuardBandSize”(2、3),…“ProbabilityFalseAlarm”、磷、“方法”,“严重”,“ThresholdOutputPort”,真正的);
创建包含随机复杂数据的41 × 41图像。然后,将数据平方以模拟平方律检测器。
x = 2 /√(2)* (randn (rs, N, N, ntrials) + 1我* randn (rs, N, N, ntrials));X2 = abs(x).^2;
处理每个图像中的所有单元格。要做到这一点,找到训练区域完全落在每个图像内的每个CUT单元的行和列。
Ngc = detector.GuardBandSize(2);Ngr = detector.GuardBandSize(1);Ntc =检测器. trainingbandsize (2);Ntr =检测器. trainingbandsize (1);Cutidx = [];colstart = Ntc + Ngc + 1;colend = N - (Ntc + Ngc);rowstart = Ntr + Ngr + 1;rowend = N - (Ntr + Ngr);为M = colstart:colend为N = rowstart:rowend cutidx = [cutidx,[N;m]];结束结束Ncutcells = size(cutidx,2);
显示CUT单元格。
cutimage = 0 (N,N);为K = 1:ncutcells的cutimage(cutidx(1, K),cutidx(2, K)) = 1;结束显示亮度图像(cutimage)轴平等的

对所有CUT细胞执行检测。返回检测分类和用于对单元进行分类的阈值。
[dets,th] =检测器(x2,cutidx);
查找并显示带有假警报的图像以作说明。
Di = [];为K = 1:ntrials d = dets(:, K);如果(any(d) > 0) di = [di,k];结束结束Idx = di(1);detimg = 0 (N,N);为K = 1:ncutcells detimg(cutidx(1, K),cutidx(2, K)) = dets(K,idx);结束显示亮度图像(detimg)轴平等的

计算经验pfa。
Pfa = sum(dets(:))/ntrials/ncutcells
Pfa = 4.5898e-04
经验的pfa和指定的pfa一致。
显示所有图像的平均经验阈值。
意思是(th (:))
Ans = 31.7139
计算所需pfa的理论阈值因子。
Threshfactor = npwgnthresh(p,1;“非相干”);Threshfactor = 10^(Threshfactor /10);disp (threshfactor)
7.6009
理论阈值因子乘以噪声方差应与实测阈值一致。
Noisevar = mean(x2(:));disp (threshfactor * noisevar);
30.4118
理论阈值与经验阈值在可接受的范围内一致。
在背景噪声中检测目标
在高斯噪声中,对包含五个紧密间隔目标的41 × 41细胞矩阵执行细胞平均CFAR检测。在1000张图像的模拟上执行此检测。使用两个具有不同保护带区域的检测器。方法手动设置阈值自定义阈值的因素。假设数据是通过平方律检测器处理的,并且没有进行脉冲积分。使用宽度为2单元格,高度为2单元格的训练单元格带。对于第一个检测器,在周围使用1个细胞的保护带将CUT细胞与训练细胞分开。对于第二个探测器,在周围使用8个单元的保护带。
注意:此示例仅在R2016b或更高版本中运行。如果您使用的是较早的版本,请将对该函数的每个调用替换为等效的函数一步语法。例如,替换myObject (x)与步骤(myObject x).
P = 5e-4;rs = RandStream.create(“mt19937ar”,“种子”5);N = 41;Ntrials = 1000;
创建1000张41 × 41的复杂随机噪声图像,标准差为1。
S = 1;x = s /√(2)* (randn (rs, N, N, ntrials) + 1我* randn (rs, N, N, ntrials));
将目标单元格值设置为1.5。然后,对单元格值进行平方。
A = 1.5;x(23,20,:) = A;x(23,18,:) = A;x(23,23,:) = A;x(20,22,:) = A;x(21,18,:) = A;X2 = abs(x).^2;
显示目标单元格。
xtgt = 0 (N,N);xtgt(23,20,:) = A;xtgt(23,18,:) = A;xtgt(23,23,:) = A;xtgt(20,22,:) = A;xtgt(21,18,:) = A;显示亮度图像(xtgt)轴平等的轴紧

将CUT细胞设置为目标细胞。
Cutidx (1,1) = 23;Cutidx (2,1) = 20;Cutidx (1,2) = 23;Cutidx (2,2) = 18;Cutidx (1,3) = 23;Cutidx (2,3) = 23;Cutidx (1,4) = 20;Cutidx (2,4) = 22;Cutidx (1,5) = 21;Cutidx (2,5) = 18;
使用两个CFAR二维检测器对所有CUT细胞进行检测。第一探测器具有小的保护带区域。训练区域可能包含影响噪声功率计算的相邻目标。第二检测器具有较大的保护带区域,使目标单元无法用于噪声计算。
创建两个CFAR检测器。
Detector1 = phase。CFARDetector2D (“TrainingBandSize”(2, 2),…“GuardBandSize”[1],“ThresholdFactor”,“自定义”,“方法”,“CA”,…“CustomThresholdFactor”2,“ThresholdOutputPort”,真正的);Detector2 = phase。CFARDetector2D (“TrainingBandSize”(2, 2),…“GuardBandSize”[8],“ThresholdFactor”,“自定义”,“方法”,“CA”,…“CustomThresholdFactor”2,“ThresholdOutputPort”,真正的);
返回检测分类和用于对单元进行分类的阈值。然后,计算检测概率。
[dets1,th1] = detector1(x2,cutidx);Ndets = numel(dets1(:));Pd1 = sum(dets1(:))/ndets
Pd1 = 0.6416
[dets2,th2] = detector2(x2,cutidx);Pd2 = sum(dets2(:))/ndets
Pd2 = 0.9396
具有较大保护带区域的检测器具有较高的pfa,因为它可以更准确地估计噪声。
更多关于
培养细胞
CFAR - 2d需要噪声功率的估计。噪声功率是从假定不包含任何目标信号的单元中计算的。这些细胞是培养细胞.训练细胞在被试细胞(CUT)周围形成一个带,但可以通过一个保护带与CUT细胞分开。通过将噪声功率乘以阈值因子来计算检测阈值。
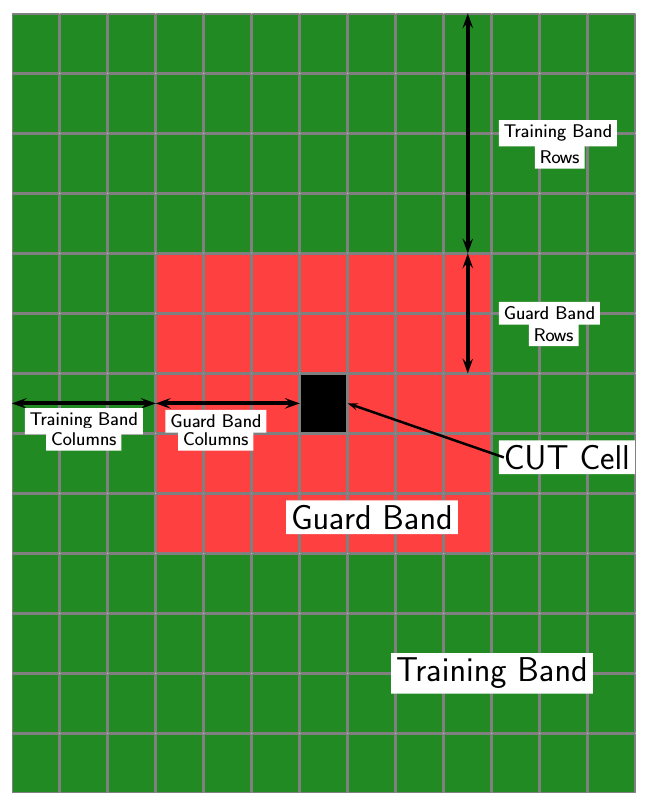
对于GOCA和SOCA平均,噪声功率来自训练单元区域的左或右一半的平均值。
因为训练区域的列数是奇数,所以中间列的单元格被相等地分配给左半部分或右半部分。
使用序统计方法时,秩不能大于训练单元区域的单元数;N火车.你可以计算N火车.
NTC为训练频带列数。
NTR为训练频带行数。
NGC是卫队纵队的数量。
NGR是守卫乐队的行数。
组合训练区、保护区和CUT细胞的细胞总数为N总计= (2 nTCn + 2GC+ 1) (2 nTRn + 2GR+ 1).
联合保护区和CUT细胞的细胞总数为N警卫= (2 nGC+ 1) (2 nGR+ 1).
训练单元的数量为N火车= N总计- N警卫.
通过构造,训练单元的数量总是偶的。因此,要实现中值过滤器,可以选择秩N火车/ 2或N火车/2 + 1.
算法
参考文献
莫特,H。雷达和通信天线.纽约:John Wiley & Sons, 1992。
理查兹,文学硕士。雷达信号处理基础.纽约:麦格劳-希尔出版社,2005。
斯科尔尼克,M。雷达系统简介,第3版。纽约:麦格劳-希尔出版社,2001。