分阶段。DPCACanceller
位移相位中心阵列(DPCA)脉冲消除器
描述
的DPCACanceller对象实现了均匀线性阵列(ULA)的位移相位中心阵列脉冲消除器。
计算空时脉冲对消器的输出信号:
请注意
从R2016b开始,而不是使用一步方法来执行由System对象™定义的操作,您可以调用带有参数的对象,就像调用函数一样。例如,Y = step(obj,x)而且Y = obj(x)执行等效操作。
建设
H =阶段性。DPCACanceller创建一个移位相位中心阵列(DPCA)消除器系统对象,H.该对象对输入数据执行双脉冲DPCA处理。
H =阶段性。DPCACanceller (创建一个DPCA对象,的名字,价值)H,每个指定的属性Name设置为指定的Value。可以以任意顺序指定附加的名称-值对参数,如(Name1,Value1、……以,家).
属性
|
均匀线性阵列 均匀线性数组,指定为 默认值: |
||||
|
信号传播速度 指定信号的传播速度,以米每秒为单位,作为一个正标量。您可以将此属性指定为单精度或双精度。 默认值:光速 |
||||
|
系统工作频率 指定系统的工作频率(单位为赫兹)为正标量。默认值为300mhz。您可以将此属性指定为单精度或双精度。 默认值: |
||||
|
脉冲重复频率源 STAP处理器的PRF值的源,指定为 默认值: |
||||
|
脉冲重复频率 接收信号的脉冲重复频率(PRF),指定为一个正标量。单位是赫兹。此属性可以指定为单精度或双精度。 依赖关系要启用此属性,请设置 默认值: |
||||
|
接收主瓣方向的源 指定STAP处理器的目标方向是否来自
默认值: |
||||
|
接收主瓣方向 指定接收传感器阵列的接收主瓣方向为长度为2的列向量。的格式指定方向 默认值: |
||||
|
移相器量化比特数 用于量化波束形成器的相移分量或转向矢量权重的比特数。指定非负整数的位数。值为零表示不执行量化。您可以将此属性指定为单精度或双精度。 默认值: |
||||
|
目标多普勒源 指定STAP处理器的目标多普勒是否来自
默认值: |
||||
|
目标多普勒频率(赫兹) 将STAP处理器的目标多普勒指定为标量。属性时应用此属性 默认值: |
||||
|
输出处理权重 要获得STAP处理器中使用的权重,请将此属性设置为 默认值: |
||||
|
输出预多普勒结果 将此属性设置为 默认值: |
例子
使用DPCA处理数据立方
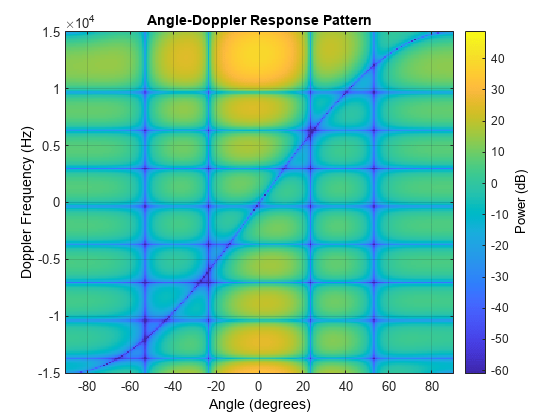
使用DPCA处理器处理数据多维数据集。为收集的数据立方体的第71个单元计算权重。看的方向是(0,0)多普勒频移为12.980 kHz。
负载STAPExampleData;Hs =阶段性的。DPCACanceller (“SensorArray”STAPEx_HArray,...脉冲重复频率的STAPEx_PRF,...“PropagationSpeed”STAPEx_PropagationSpeed,...“OperatingFrequency”STAPEx_OperatingFrequency,...“WeightsOutputPort”,真的,...“DirectionSource”,输入端口的,...“DopplerSource”,输入端口的);[y,w] = step(Hs,STAPEx_ReceivePulse,71,[0;0],12.980e3);sAngDop =相控的。AngleDopplerResponse (...“SensorArray”,海关。SensorArray,...“OperatingFrequency”,海关。OperatingFrequency,...脉冲重复频率的,海关。脉冲重复频率,...“PropagationSpeed”, Hs.PropagationSpeed);plotResponse (sAngDop w)
算法
参考文献
[1]格尔西。雷达的时空自适应处理.波士顿:Artech House, 2003。
机载雷达数据系统的时空自适应处理,技术报告10151994年12月,麻省理工学院林肯实验室。
扩展功能
版本历史
在R2011a中介绍
您也可以从以下列表中选择网站: