phitheta2azel
Convert angles from phi/theta form to azimuth/elevation form
Description
AzEl= phitheta2azel(PhiTheta)
Examples
Input Arguments
Output Arguments
More About
Azimuth and Elevation Angles
Theazimuth angleof a vector is the angle between thex-axis and the orthogonal projection of the vector onto thexyplane. The angle is positive in going from thexaxis toward theyaxis. Azimuth angles lie between –180 and 180 degrees. Theelevation angleis the angle between the vector and its orthogonal projection onto thexy飞机。的角度对th时是积极的e positivez-axis from thexyplane. By default, the boresight direction of an element or array is aligned with the positivex-axis. The boresight direction is the direction of the main lobe of an element or array.
Note
The elevation angle is sometimes defined in the literature as the angle a vector makes with the positivez-axis. The MATLAB®and Phased Array System Toolbox™ products do not use this definition.
This figure illustrates the azimuth angle and elevation angle for a vector shown as a green solid line.

Phi and Theta Angles
The phi angle (φ) is the angle from the positivey-axis to the vector’s orthogonal projection onto theyzplane. The angle is positive toward the positivez-axis. The phi angle is between 0 and 360 degrees. The theta angle (θ) is the angle from thex-axis to the vector itself. The angle is positive toward theyzplane. The theta angle is between 0 and 180 degrees.
The figure illustrates phi and theta for a vector that appears as a green solid line.
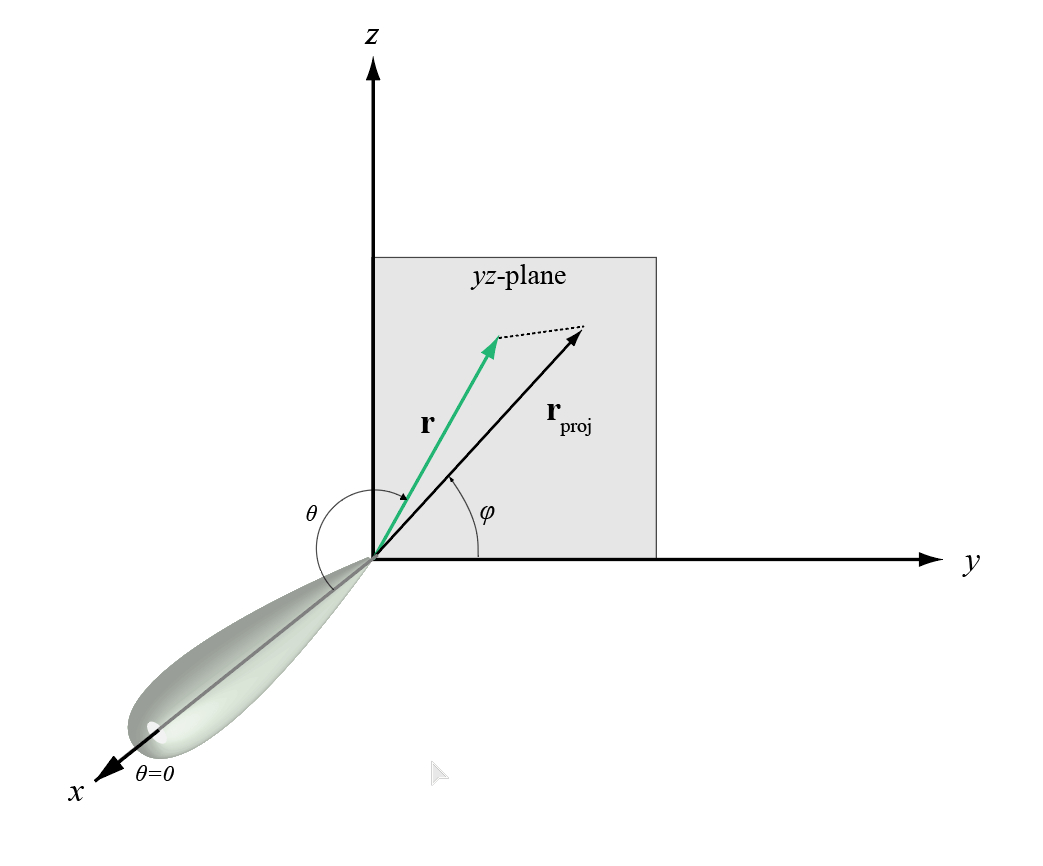
The coordinate transformations between φ/θ andaz/elare described by the following equations
Alternative Definition of Phi and Theta Angles
The phi angle (φ) is the angle from the positivex-axis to the vector’s orthogonal projection onto thexyplane. The angle is positive toward the positivey-axis. The phi angle is between 0 and 360 degrees. The theta angle (θ) is the angle from thez-axis to the vector itself. The angle is positive toward thexyplane. The theta angle is between 0 and 180 degrees.
The figure illustratesφandθfor a vector that appears as a green solid line.
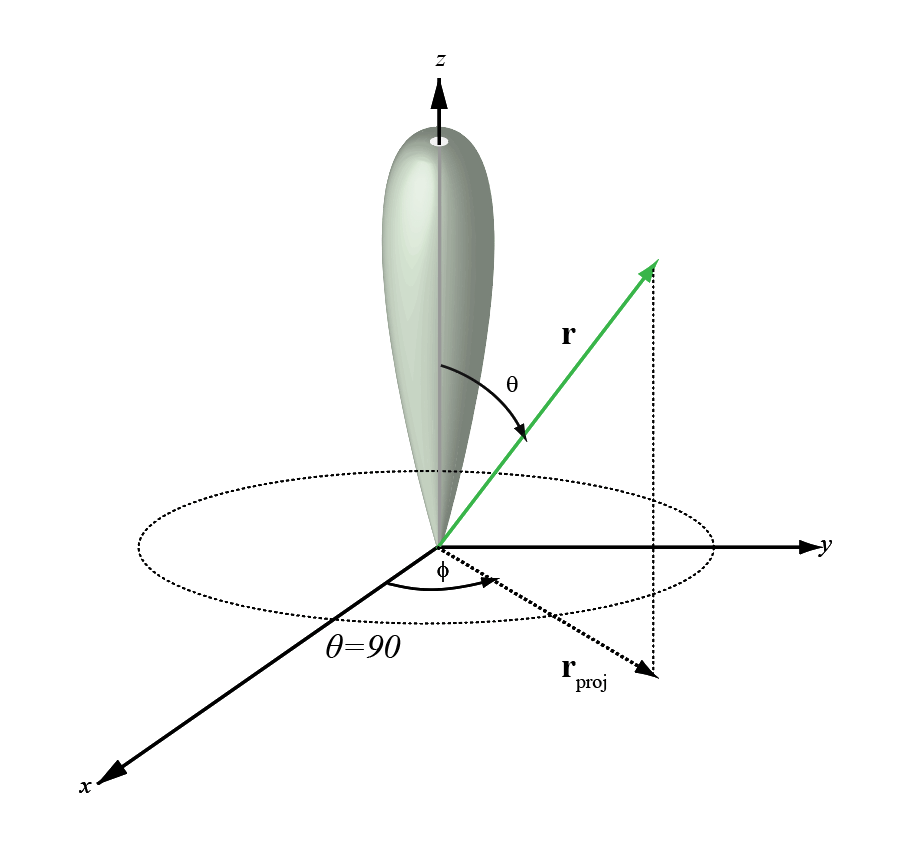
This transformation applies whenRotAxisfalse.
Extended Capabilities
Version History
Introduced in R2012a
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)