球坐标
万博1manbetx支持球坐标
球坐标描述向量或点在空间距离和两个角度。远处,R是一般的欧几里得范数。有多个约定关于两个角的规范。它们包括:
方位角和高度角
φ和θ角
u和v坐标
相控阵系统工具箱™软件本身支持方位/高程表示。万博1manbetx该软件还提供了功能之间的转换方位/高程表示,另一个表示。看到φ和θ角和U和V坐标。
方位角和高度角
在相控阵系统工具箱软件,主要为球坐标如下约定:
使用方位角,阿兹仰角,埃尔,定义单位球上的一个点的位置。
指定所有角度的度。
序列中的坐标列表(阿兹,埃尔,R)。
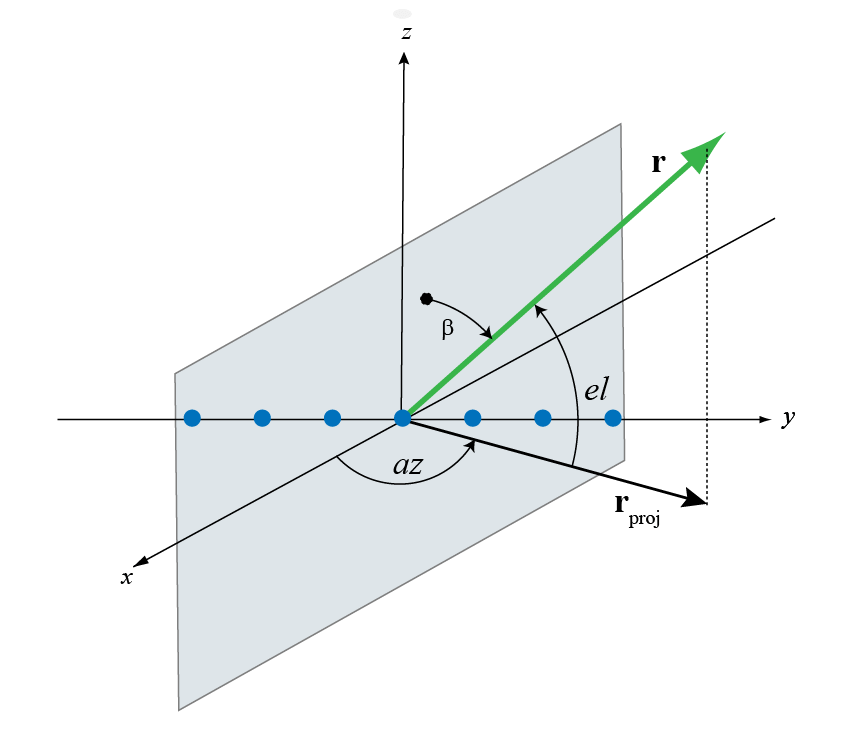
的方位角一个向量之间的角度x设在和矢量的正交投影到xy飞机。从的角度是积极的x轴向y轴。方位角度介于-180和180度。的仰角向量之间的夹角及其正交投影吗xy飞机。时角是积极向积极的一面z设在从xy飞机。默认情况下,元素或数组的瞄准线方向与积极的一面x设在。瞄准线方向的主瓣方向是一个元素或数组。
请注意
仰角有时在文献中定义为角度向量与积极的一面z设在。MATLAB®和相控阵系统工具箱产品不使用这个定义。s manbetx 845
这个数字说明了方位角和仰角矢量显示为绿色的实线。

φ和θ角
作为一个替代方位角和高度角,你可以使用角度用φ和θ表达单位球上的一个点的位置。将φ和θ表示和相应的方位/高程表示,使用坐标转换功能,phitheta2azel和azel2phitheta。
φ角(φ从积极的角度y设在向量的正交投影yz飞机。角是积极向积极的一面z设在。φ角是在0和360度之间。θ角(θ)的角度x设在向量本身。角是积极的向yz飞机。θ角是在0和180度之间。
这个数字说明了一个向量φ和θ显示为绿色的实线。

φ/θ和之间的坐标转换阿兹/埃尔通过下面的方程来描述吗
U和V坐标
在雷达应用程序中,通常是有用的参数化使用坐标用半球x≥0u和v。
将与相应的φ和θ表示u/v表示,使用坐标转换函数
phitheta2uv和uv2phitheta。
您可以定义u和v用φ和θ:
在这些表达式,φ和θ是φ和θ角,分别。
转换方位和仰角u和v使用转换
只有在有效范围abs (az)≤= 90。
的值u和v满足的不平等
相反,φ和θ角可以写成的u和v使用
方位角和高度角也可以写的u和v:
矩形和球面坐标之间的转换
以下方程定义了直角坐标之间的关系(阿兹,埃尔,R用于相控阵系统工具箱软件)表示。
将直角坐标系(阿兹,埃尔,R):
转换(阿兹,埃尔,R直角坐标系中):
当指定目标的位置对相控阵,通常指的是它的距离和方向从数组中。从数组中对应的距离R在球坐标。对应于方位角和高度角的方向。
较宽的角度
较宽的角度是有用的在描述的反应均匀线性阵列(ULA)”冲击信号。阵列响应直接取决于侧向角,而不是单独的方位角和高度角。下图显示了一个与元素在齿龈y设在蓝色所示。考虑一个平面正交于齿龈轴在原点。侧向角β,飞机和信号方向之间的夹角。计算侧向角度,构建一条线从任何点上的信号路径平面,平面正交。这两条线之间的夹角是侧向角和位于区间(-90°、90°)。测量时侧向角是积极向阵列轴的正方向。当β是零,是阵列轴正交的信号路径。β=±90时,信号通路是沿着阵列轴。所有信号路径拥有相同的侧向角齿龈周围形成一个锥形轴。
从方位角度的转换,阿兹和仰角,埃尔侧向角,β,是
这个方程表明,
为零的仰角,侧向角等于方位角。
高度角同样上方和下方xy飞机导致相同侧向角度。
您可以转换从侧向角方位角但是你必须指定仰角
因为对于一个给定的信号路径侧向角,β在阵列轴,形成一个锥形,不能任意指定仰角。仰角和侧向角必须满足
作为一个例子,下面的图显示了一个与元素的齿龈d米远的y设在。齿龈被一个平面波发出一个点在远场源。选择方位角为90°。然后信号方向在于yz飞机和满足sinβ= cos (埃尔)。侧向角是补的仰角。

因为到达角,数组元素不同时由平面波照明。额外的距离数组元素之间的入射波的旅行d sinβ在哪里d是数组元素之间的距离。常量时间延迟,τ数组元素之间
在哪里c波的速度。
侧向角的±90°,阵列的信号事件阵列轴平行平等和传感器之间的时间延迟±d / c。侧向角为零,平面波齿龈同时照亮所有元素和元素之间的时间延迟是零。
相控阵系统工具箱软件提供的功能az2broadside和broadside2az方位和侧向角之间的转换。
在侧向角度和方位和仰角之间进行转换
下面的例子显示如何使用az2broadside和broadside2az功能。
位于目标方位角的45°和海拔60°角相对于齿龈。确定相应的侧向角。
bsang = az2broadside (45、60)
bsang = 20.7048
计算事件信号到达的方位侧向45°角,海拔20°。
阿兹= broadside2az(45岁,20)
阿兹= 48.8063