phased.ScenarioViewer
显示雷达和目标的运动
描述
的phased.ScenarioViewer系统对象™创建一个3 d查看器显示雷达和目标的运动,你在雷达仿真模型。您可以显示当前位置和速度,对象跟踪,位置和速度注释,雷达波束的方向,和其他对象参数。你可以改变雷达波束范围等特性和在模拟波束宽度。您可以使用phased.Platform系统对象模型的移动对象或者你可以提供你自己的动态模型。
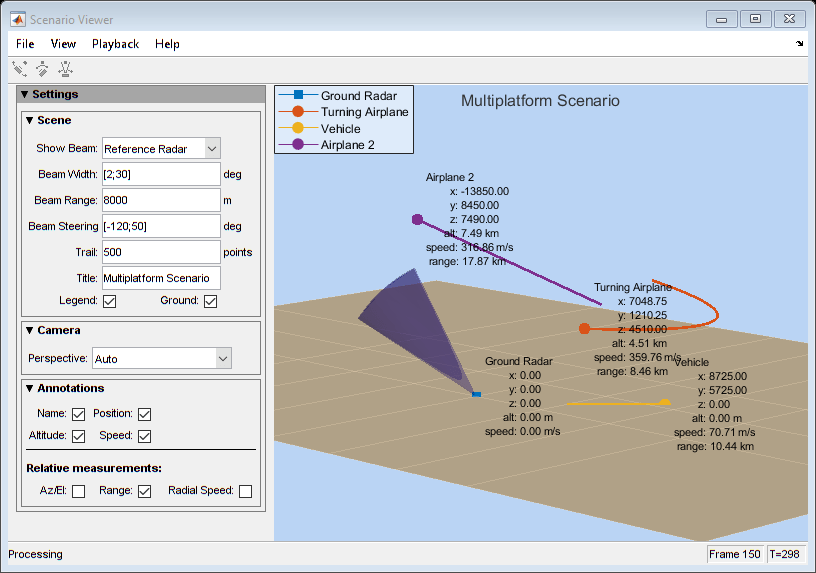
这个图显示了一个four-object场景组成的地面雷达,两架飞机和地面车辆。你可以把这个图生成的代码可视化多平台的场景的例子。

创建一个场景查看器:
请注意
从R2016b开始,而不是使用一步定义的方法来执行操作系统对象,您可以调用对象的参数,就好像它是一个函数。例如,y =步骤(obj, x)和y = obj (x)执行相同操作。
建设
姐姐= phased.ScenarioViewer姐姐默认的属性值。
姐姐= phased.ScenarioViewer(名称,值)姐姐任何指定的属性的名字设置为指定价值。的名字必须出现在单引号(”)。您可以指定几个名称-值对参数在任何顺序Name1, Value1,…,的家。
属性
例子
查看固定雷达和一个目标的跟踪
可视化跟踪单个飞机的雷达和目标。雷达是静止的,飞机正朝着一条直线。保持飞机的雷达波束指向。
™创建雷达和飞机平台系统对象。设置更新速度为0.1秒。
updateRate = 0.1;radarPlatform = phased.Platform (…“InitialPosition”(0,0,10),…“速度”,(0,0,0));airplanePlatforms = phased.Platform (…“InitialPosition”(5000.0;3500.0;6000.0),…“速度”,-300,0,0);
创建phased.ScenarioViewer系统对象。显示雷达波束和注释的轨道位置,速度和高度。
然而= phased.ScenarioViewer (“BeamRange”,5000.0,“UpdateRate”updateRate,…“PlatformNames”,{“地面雷达”,“飞机”},“ShowPosition”,真的,…“ShowSpeed”,真的,“ShowAltitude”,真的,“ShowLegend”,真正的);
运行场景。在每个步骤中,计算目标的角。用这个角度来引导雷达波束指向目标。
为i = 1:10 0 [radar_pos radar_vel] =步骤(radarPlatform updateRate);[tgt_pos, tgt_vel] = (airplanePlatforms updateRate)步;(rng, ang) = rangeangle (tgt_pos radar_pos);科学价值。BeamSteering = ang;步骤(然而,radar_pos radar_vel、tgt_pos tgt_vel);暂停(0.1);结束

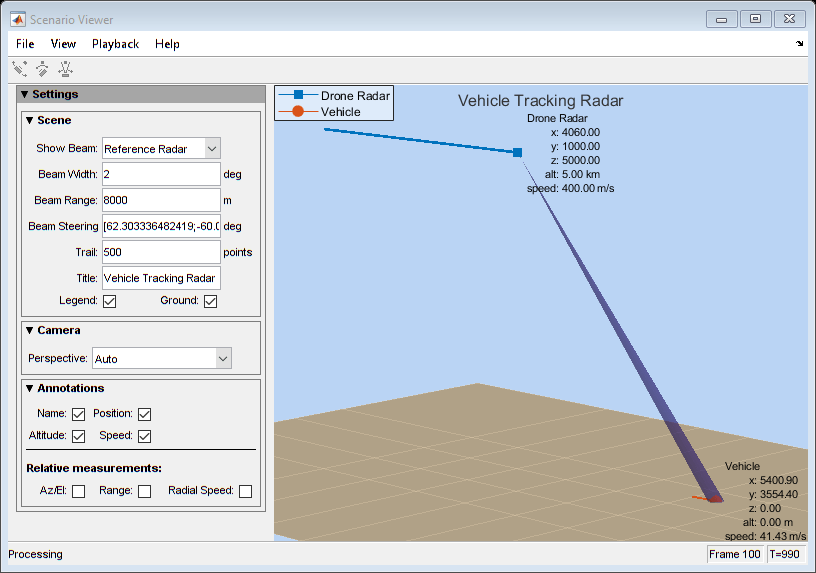
查看机载雷达和地面目标的跟踪
可视化跟踪的机载雷达和地面车辆目标。机载雷达是由5公里的无人机的飞行高度。
创建无人机雷达和地面车辆使用phased.Platform™系统对象。设置更新速度为0.1秒。
updateRate = 0.1;无人机= phased.Platform (…“InitialPosition”(100;1000;5000),…“速度”,400,0,0);车辆= phased.Platform (“MotionModel”,“加速”,…“InitialPosition”(5000.0;3500.0;0.0),…“InitialVelocity”(40;5 0),“加速”,(0.1,0.1,0));
创建phased.ScenarioViewer系统对象。显示雷达波束和注释的轨道位置,速度和高度。
观众= phased.ScenarioViewer (“BeamRange”,8000.0,波束宽度的2,“UpdateRate”updateRate,…“PlatformNames”,{“无人机雷达”,“汽车”},“ShowPosition”,真的,…“ShowSpeed”,真的,“ShowAltitude”,真的,“ShowLegend”,真的,“标题”,车辆跟踪雷达的);
运行场景。在每个步骤中,计算目标的角。用这个角度来引导雷达波束指向目标。
为i = 1:10 0 [radar_pos radar_vel] =步骤(无人机,updateRate);[tgt_pos, tgt_vel] =(车辆、updateRate)步;(rng, ang) = rangeangle (tgt_pos radar_pos);查看器。BeamSteering = ang;查看器(radar_pos radar_vel、tgt_pos tgt_vel)暂停(1。)结束
可视化多平台的场景
这个例子显示了如何创建和显示一个多平台的场景包含地面静止的雷达,将飞机,常速飞机和地面车辆移动。把飞机沿着抛物线飞行路径而下降的速度20米/秒。
指定的场景在0.5 Hz刷新率。150步,300年代场景的时间。
updateRate = 0.5;N = 150;
建立了飞机使用加速度的模型phased.Platform系统对象™。指定范围的飞机的初始位置和地面雷达的方位和仰角。飞机从雷达10公里60°方位,6公里的高度。飞机正在加速在10 m / s²负面的x方向。
airplane1range = 10.0 e3;airplane1Azimuth = 60.0;airplane1alt = 6.0 e3;airplane1Pos0 = [cosd (airplane1Azimuth) * airplane1range;…信德(airplane1Azimuth) * airplane1range; airplane1alt);airplane1Vel0 = (400.0, -100.0, -20);airplane1Accel = (-10.0; 0.0; 0.0);airplane1platform = phased.Platform (“MotionModel”,“加速”,…“AccelerationSource”,输入端口的,“InitialPosition”airplane1Pos0,…“InitialVelocity”airplane1Vel0,“OrientationAxesOutputPort”,真的,…“InitialOrientationAxes”、眼睛(3));
设置固定地面雷达在全球坐标系统的起源。模拟一个旋转雷达,改变地面雷达波束转向角处理循环。
groundRadarPos = (0, 0, 0) ';groundRadarVel = (0, 0, 0) ';groundradarplatform = phased.Platform (“MotionModel”,“速度”,…“InitialPosition”groundRadarPos,“速度”groundRadarVel,…“InitialOrientationAxes”、眼睛(3));
建立了地面车辆在一个恒定的速度移动。
groundVehiclePos = (5 e3, 2 e3, 0) ';groundVehicleVel = (50 50 0) ';groundvehicleplatform = phased.Platform (“MotionModel”,“速度”,…“InitialPosition”groundVehiclePos,“速度”groundVehicleVel,…“InitialOrientationAxes”、眼睛(3));
设置第二架飞机也在恒定的速度移动。
airplane2Pos = (8.5 e3, 1 e3, 6000) ';airplane2Vel = (-300100, 20) ';airplane2platform = phased.Platform (“MotionModel”,“速度”,…“InitialPosition”airplane2Pos,“速度”airplane2Vel,…“InitialOrientationAxes”、眼睛(3));
设置场景中查看器。指定雷达波束范围的8公里,垂直波束宽度30°,水平波束宽度2°。注释的轨道位置,速度,高度,和范围。
BeamSteering = (0; 50);观众= phased.ScenarioViewer (“BeamRange”,8.0 e3,波束宽度的(2、30),“UpdateRate”updateRate,…“PlatformNames”,{“地面雷达”,“把飞机”,“汽车”,《飞机2》},“ShowPosition”,真的,…“ShowSpeed”,真的,“ShowAltitude”,真的,“ShowLegend”,真的,“ShowRange”,真的,…“标题”,“多平台的场景”,“BeamSteering”,BeamSteering);
通过显示处理循环,一步更新雷达和目标位置。4度旋转地面雷达转向角的每一个步骤。
为n = 1: n [groundRadarPos groundRadarVel] = groundradarplatform (updateRate);[airplane1Pos, airplane1Vel airplane1Axes] = airplane1platform (updateRate airplane1Accel);[vehiclePos, vehicleVel] = groundvehicleplatform (updateRate);[airplane2Pos, airplane2Vel] = airplane2platform (updateRate);查看器(groundRadarPos groundRadarVel [airplane1Pos vehiclePos, airplane2Pos),…[airplane1Vel, vehicleVel airplane2Vel]);BeamSteering = viewer.BeamSteering (1);BeamSteering = mod (BeamSteering + 4360 .0);如果BeamSteering > 180.0 BeamSteering = BeamSteering - 360.0;结束viewer.BeamSteering (1) = BeamSteering;暂停(0.2);结束