阶段
传感器阵列转向矢量
描述
这转向器系统对象为传感器阵列创建用于多个方向和频率的传感器阵列的转向矢量。
为指定方向和频率计算阵列的转向向量
创造
阶段对象并设置其属性。使用参数调用对象,就像它是一个函数。
要了解有关系统对象如何工作的更多信息,请参阅什么是系统对象?。
创建
描述
Steervec.=阶段Steervec.,默认属性值。
Steervec.= Phased.steringVector(姓名那价值)姓名设置为指定的价值。您可以按任何顺序指定其他名称值对参数(名称1那value1.,......,namen.那赋值)。用单引号括起每个属性名称。
steervec = phased.steringvector('sensorArray',phased.ura,'传播',physconst('lightspeed'))为具有默认URA属性值的统一矩形阵列(URA)的转向传染媒介对象,并将传播速度设置为光速。
特性
用法
描述
SV.= steervec(弗里克那ang)SV.,指向指定的指示ang以及指定的操作频率弗里克。的意思SV.取决于includeLementResponse.财产,如下:
如果includeLementResponse.是
真的,组件SV.包括单个元素响应。如果includeLementResponse.是
错误的,计算假定元素是各向同性的SV.不包括单个元素响应。如果阵列包含子阵列,SV.是子阵列中的阵列因子。每个子阵段的相位中心位于其几何中心。如果传感器阵列不包含子阵列,SV.是元素之间的数组因素。
SV.= steervec(弗里克那ang那斯特朗)斯特朗。要使用此语法,请设置传感器阵列属性到包含子阵列并设置的数组类型includeLementResponse.到真的。包含子阵列的阵列是分阶段.PartitionedArray.和阶段。重复化。在这种情况下,设置子阵列这些阵列的财产'阶段'或者'时间'。
输入参数
输出参数
对象功能
要使用对象函数,请将System对象指定为第一个输入参数。例如,要发布命名的系统对象的系统资源obj.,使用此语法:
释放(obj)
例子
均匀线性阵列的转向矢量
在30度方位角和20度高度的方向上计算并显示4元件均匀线性阵列的转向载体。假设阵列的工作频率为300 MHz。
array = phased.ula('numElements'4);steervec = phased.steringvector('sensorarray',大批);FC = 3E8;ang = [30;20];sv = steervec(FC,Ang)
sv =4×1复合物-0.6011 - 0.7992i 0.7394 - 0.6732I 0.7394 + 0.6732I -0.6011 + 0.7992i
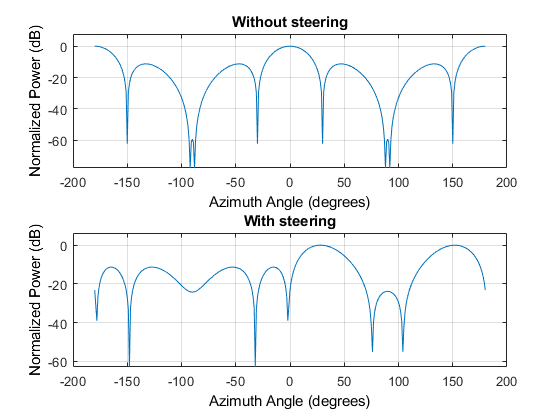
梁图案与且没有转向的
在30度方位角和20度高度的方向上计算4元件均匀线性阵列(ULA)的转向载体。假设阵列工作频率为300 MHz。
FC = 300E6;c = physconst('LightSpeed');array = phased.ula('numElements'4);steervec = phased.steringvector('sensorarray',大批);sv = steervec(fc,[30; 20]);
绘制均匀线性阵列的光束图案当没有施加转向载体时(转向宽边),并且当施加转向载体时。
子图(211)模式(阵列,FC,-180:180,0,'坐标系'那'矩形的'那......'繁殖',C,'类型'那'powerdb') 标题('没有转向')子图(212)模式(阵列,FC,-180:180,0,'坐标系'那'矩形的'那......'繁殖',C,'类型'那'powerdb'那'重量',sv)标题('带叛')
均匀线性阵列的转向矢量
在30°方位角和20°高度的方向上计算均匀线性阵列的转向载体。假设阵列以300 MHz运行。
笔记:此示例仅在R2016B或更高版本中运行。如果您使用的是早期版本,请将每个调用替换为等同的函数步句法。例如,更换myobject(x)和步骤(myobject,x)。
array = phased.ula('numElements',2);steeringvector = phased.steringvector('sensorarray',大批);FC = 300.0E6;ang = [30; 20];SV =转向器(Fc,Ang);
参考
[1]范树,H.最佳阵列处理。纽约:Wiley-Interscience,2002。
扩展能力
您还可以从以下列表中选择一个网站: