uv2azelpat
将辐射模式从U/V形式转换为方位角/高程形式
句法
描述
例子
转换辐射模式
将辐射图案转换为方位角/高程形式,其角度间隔为1°。
根据你和v。因为你和v单位圆外的值不是物理,将该区域中的模式值设置为零。
U = -1:0.01:1;V = -1:0.01:1;[u_grid,v_grid] = meshgrid(u,v);pat_uv = sqrt(1 -u_grid。^2 -v_grid。^2);pat_uv(hypot(u_grid,v_grid)> = 1)= 0;
将图案转换为方位角/高程空间。
pat_azel = uv2azelpat(pat_uv,u,v);
情节转换的辐射模式
将辐射图案转换为方位角/高程形式,其角度间隔为1°。
根据你和v。因为你和v单位圆外的值不是物理,将该区域中的模式值设置为零。
U = -1:0.01:1;V = -1:0.01:1;[u_grid,v_grid] = meshgrid(u,v);pat_uv = sqrt(1 -u_grid。^2 -v_grid。^2);pat_uv(hypot(u_grid,v_grid)> = 1)= 0;
将图案转换为方位角/高程空间。存储绘图的方位角和高程角度。
[pat_azel,az,el] = uv2azelpat(pat_uv,u,v);
绘制图案。
H = Surf(AZ,EL,Pat_azel);h.linestyle ='没有任何';Xlabel(“方位角(学位)”)ylabel(“高程(学位)”)Zlabel('图案')

使用特定方位角/高程值转换辐射模式
将辐射模式转换为方位角/高程形式,其角度间隔为5°。
根据你和v。因为你和v单位圆外的值不是物理,将该区域中的模式值设置为零。
U = -1:0.01:1;V = -1:0.01:1;[u_grid,v_grid] = meshgrid(u,v);pat_uv = sqrt(1 -u_grid。^2 -v_grid。^2);pat_uv(hypot(u_grid,v_grid)> = 1)= 0;
定义对图案采样的方位角和高程角度的集合。然后转换图案。
AZ = -90:5:90;EL = -90:5:90;pat_azel = uv2azelpat(pat_uv,u,v,az,el);
绘制图案。
H = Surf(AZ,EL,Pat_azel);h.linestyle ='没有任何';Xlabel(“方位角(学位)”)ylabel(“高程(学位)”)Zlabel('图案')

输入参数
输出参数
更多关于
phi角,theta角
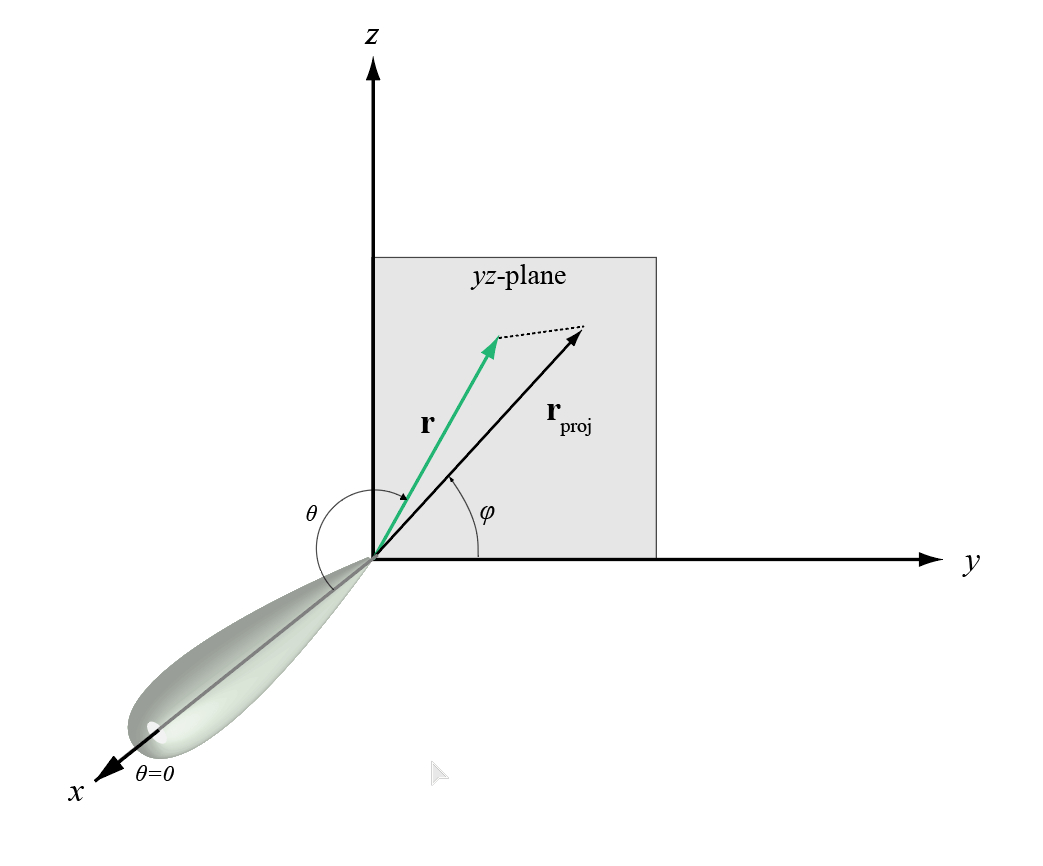
PHI角(φ)是阳性的角度y- 向量的正交投影到Yz飞机。角度与阳性为正z-轴。PHI角度在0至360度之间。theta角(θ)是从X- 向量本身。角度是正向Yz飞机。theta角度在0到180度之间。
该图说明了作为绿色实线的矢量的phi和theta。
φ/θ和AZ/EL由以下方程式描述
方位角,高度角度
这方位角向量的是X- 轴和向量的正交投影xy飞机。角度是积极的X朝向轴y轴。方位角位于–180至180度之间。这高程角是向量及其正交投影之间的角度xy-飞机。当朝向正时,角度是阳性的z- 轴xy飞机。默认情况下,元素或数组的孔隙方向与正对齐X-轴。钻孔方向是元素或数组的主叶的方向。
笔记
在文献中有时将高程角定义为矢量与正相同的角度z-轴。matlab®分阶段阵列系统工具箱™产品不使用此定义。s manbetx 845
该图说明了显示为绿色实线的矢量的方位角和高程角。

扩展功能
版本历史记录
您还可以从以下列表中选择一个网站:
美洲
- AméricaLatina(Español)
- 加拿大(英语)
- 美国(英语)