微分gydF4y2Ba
允许从动轴以不同速度旋转的齿轮机构gydF4y2Ba
- 库:gydF4y2Ba
Simscape / Driveline / GearsgydF4y2Ba

描述gydF4y2Ba
的gydF4y2Ba微分gydF4y2Ba块代表一个齿轮机构,允许从动轴以不同的速度旋转。差速器在汽车中很常见,它们使不同的车轮在转弯时以不同的速度旋转。港口gydF4y2BaDgydF4y2Ba,gydF4y2BaS1gydF4y2Ba, 和gydF4y2BaS2gydF4y2Ba分别表示差速器的纵向传动轴和太阳轮轴。任何一根轴都能带动另外两根。gydF4y2Ba
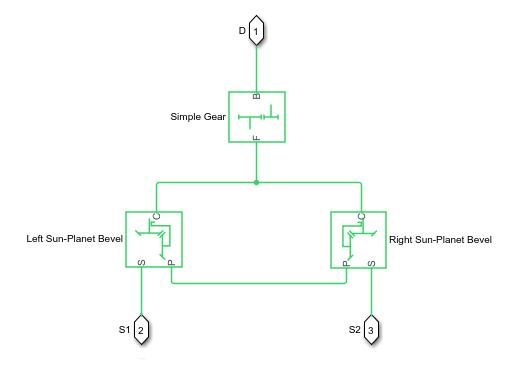
块模型的差动机构作为一个结构组件基于gydF4y2Ba简单的齿轮gydF4y2Ba和gydF4y2BaSun-Planet斜gydF4y2BaSimscape™动力传动系统™gydF4y2Ba块。的等效框图gydF4y2Ba微分gydF4y2Ba块。gydF4y2Ba
为了增加齿轮模型的保真度,指定诸如齿轮惯性、啮合损失和粘性损失等属性。默认情况下,齿轮惯性和粘性损失可以忽略不计。该块使您能够指定齿轮载体和内行星齿轮的惯性。为了建模外齿轮的惯性,连接SimscapegydF4y2Ba惯性gydF4y2Ba块港口gydF4y2BaDgydF4y2Ba,gydF4y2BaS1gydF4y2Ba, 和gydF4y2BaS2gydF4y2Ba.gydF4y2Ba
热建模gydF4y2Ba
您可以通过启用可选的热端口来模拟热流和温度变化的影响。如果要启用端口,请设置gydF4y2Ba摩擦模型gydF4y2Ba来gydF4y2Ba与温度有关的效率gydF4y2Ba.gydF4y2Ba
方程gydF4y2Ba
微分在三个连接的轴上施加一个运动约束,使gydF4y2Ba
地点:gydF4y2Ba
ω.gydF4y2BaS1gydF4y2Ba为太阳齿轮轴1的速度。gydF4y2Ba
ω.gydF4y2BaS2gydF4y2Ba为太阳齿轮轴2的速度。gydF4y2Ba
负值表示差值在中心线左侧。三个自由度简化为两个独立的自由度。齿轮对为(1,2)= (gydF4y2Ba年代gydF4y2Ba,gydF4y2Ba年代gydF4y2Ba)和(gydF4y2BaCgydF4y2Ba,gydF4y2BaDgydF4y2Ba).gydF4y2BaCgydF4y2Ba是承运人。gydF4y2Ba
横向运动的总和是变换的纵向运动。侧面运动的差异,gydF4y2Ba ,与纵向运动无关。横向轴的一般运动是这两个独立自由度的叠加,这两个自由度具有如下物理意义:gydF4y2Ba
纵向自由度相当于两根侧轴以相同的角速度旋转,gydF4y2Ba ,且与纵轴的比例固定。gydF4y2Ba
微分自由度相当于保持纵向驱动轴锁定,gydF4y2Ba ,在那里gydF4y2Baω.gydF4y2BaDgydF4y2Ba为传动轴的速度,当横向轴相对方向旋转时,gydF4y2Ba .gydF4y2Ba
横向轴力矩受到纵向轴力矩的约束,使得净潮流和为零:gydF4y2Ba
地点:gydF4y2Ba
τ.gydF4y2BaS1gydF4y2Ba和gydF4y2Baτ.gydF4y2BaS2gydF4y2Ba是沿横向轴的力矩。gydF4y2Ba
τ.gydF4y2BaDgydF4y2Ba为纵向扭矩。gydF4y2Ba
PgydF4y2Ba损失gydF4y2Ba为功率损失。gydF4y2Ba
当相结合运动和功率约束时,理想情况下的产量gydF4y2Ba
在哪里gydF4y2BaggydF4y2BaDgydF4y2Ba为纵向传动轴的传动比。gydF4y2Ba
有效的gydF4y2Ba微分gydF4y2Ba块约束由两个太阳行星锥齿轮子约束组成。gydF4y2Ba
第一个子约束是由于两个太阳行星锥齿轮与载体的耦合:gydF4y2Ba
在哪里gydF4y2BaggydF4y2BaSP1gydF4y2Ba和gydF4y2BaggydF4y2BaSP2gydF4y2Ba是太阳行星齿轮的传动比。gydF4y2Ba
第二个子约束是由于载体与纵向传动轴的耦合:gydF4y2Ba
太阳行星锥齿轮的太阳行星齿轮比,根据半径,gydF4y2BargydF4y2Ba,太阳行星齿轮是:gydF4y2Ba
的gydF4y2Ba微分gydF4y2Ba块是用gydF4y2Ba ,留下gydF4y2BaggydF4y2BaDgydF4y2Ba自由调整。gydF4y2Ba
在非面病案中,gydF4y2Baτ.gydF4y2Ba损失gydF4y2Ba≠0gydF4y2Ba.有关更多信息,请参见gydF4y2Ba齿轮损耗模型gydF4y2Ba.gydF4y2Ba
假设和限制gydF4y2Ba
假设齿轮是刚性的。gydF4y2Ba
库仑摩擦减慢了模拟速度。有关更多信息,请参见gydF4y2Ba调整模型的保真度gydF4y2Ba.gydF4y2Ba
港口gydF4y2Ba
保护gydF4y2Ba
参数gydF4y2Ba
更多关于gydF4y2Ba
扩展功能gydF4y2Ba
另请参阅gydF4y2Ba
圆盘摩擦离合器gydF4y2Ba|gydF4y2Ba简单的齿轮gydF4y2Ba|gydF4y2BaSun-Planet斜gydF4y2Ba
选择网站gydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba.gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba你也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- América拉丁gydF4y2Ba(Español)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德意志)gydF4y2Ba
- 西班牙gydF4y2Ba(Español)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德意志)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本语gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba