主要内容
感应机直接扭矩控制
感应机DTC
- 图书馆:
Simscape /电气/控制/感应机控制
描述
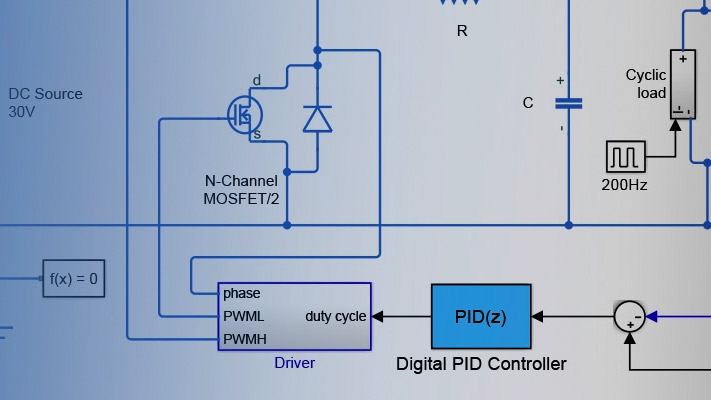
这感应机直接扭矩控制块实现一个感应机直接扭矩控制(DTC)结构。该图显示了块的等效电路。

方程式
估计扭矩和磁通量,感应机直接扭矩控制块离散机电压方程在平稳状态下ɑβ.使用后向欧拉方法参考帧。定子通量的离散时间方程ɑβ.框架是:
和
在哪里:
V.ɑ是ɑ-AXIS电压。
一世ɑ是ɑ-axis电流。
R.S.是定子抵抗力。
Ψɑ是ɑ设在定子磁通。
V.β是β-AXIS电压。
一世β是β-axis电流。
Ψβ是β设在定子磁通。
该块计算扭矩和磁通量:
和
在哪里:
P.是杆对的数量。
ΨS.是定子助焊剂。
为了检测磁通和扭矩估计误差,块使用滞后比较器。该图显示了滞后比较器和相关的交换扇区。

表格显示了逆变器高侧系统的最佳开关。
| CΨ那CT.S.(θ) | S.0. | S.1 | S.2 | S.3. | S.4. | S.5. | |
|---|---|---|---|---|---|---|---|
| CΨ= 1 | CT.= 1 | 1,1,0 |
0,1,0 |
0,1,1 |
0,0,1 |
1,0,1 |
1,0,0 |
| CT.= 0. | 1,1,1 |
0,0,0 |
1,1,1 |
0,0,0 |
1,1,1 |
0,0,0 |
|
| CT.= -1 | 1,0,1 |
1,0,0 |
1,1,0 |
0,1,0 |
0,1,1 |
0,0,1 |
|
| CΨ= 0. | CT.= 1 | 0,1,0 |
0,1,1 |
0,0,1 |
1,0,1 |
1,0,0 |
1,1,0 |
| CT.= 0. | 0,0,0 |
1,1,1 |
0,0,0 |
1,1,1 |
0,0,0 |
1,1,1 |
|
| CT.= -1 | 0,0,1 |
1,0,1 |
1,0,0 |
1,1,0 |
0,1,0 |
0,1,1 |
|
假设和局限性
功率逆变器死亡时间不被考虑。对于硬件实现,请在外部添加死区时间。
港口
输入
输出
参数
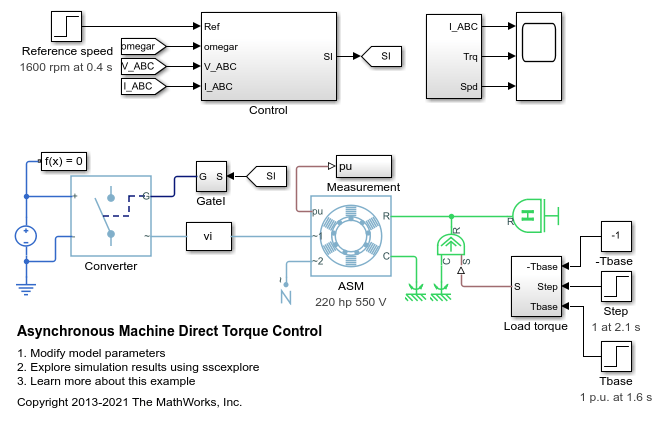
模型例子
参考文献
[1] Takahashi,I.和Noguchi。“一种进一步电动机的新快速反应和高效控制策略。”IEEE行业应用的交易。卷。IA-22,第5号,1986号,PP。820 - 827。
扩展能力
在R2017B中介绍
您还可以从以下列表中选择一个网站: