clusterDBSCAN
Density-based算法聚类数据
描述
clusterDBSCAN集群数据点属于一个P维特征空间使用density-based空间聚类的应用程序与噪声(DBSCAN)算法。聚类算法分配点在特征空间相互接近到一个集群。例如,雷达系统可以返回多个检测紧密间隔的扩展目标范围,角度和多普勒。clusterDBSCAN分配这些检测到一个检测。
DBSCAN算法假设集群区域空间分隔的数据密集地区的低密度和密集的地区也有类似的密度。
测量密度在一定程度上,该算法计算数据点的数量在一个附近的点。社区是一个P在特征空间维椭圆(hyperellipse)。的半径椭圆的定义P向量ε。ε可以是标量,在这种情况下,hyperellipse变成超球面。点之间的距离计算特征空间使用欧氏距离度量。附近称为ε-neighborhood。ε的价值定义的
ε财产。ε要么是一个标量或P向量:一个矢量在特征空间时使用不同的维度有不同的单位。
一个标量相同的值适用于所有维度。
集群首先发现核心点。如果一个点ε-neighborhood足够数量的点,点被称为核心点。所需的最小数量的点一个点成为一个核心问题是设定的
MinNumPoints财产。其余点的ε-neighborhood核心点可以核心点自己。如果不是,他们是边境点。所有ε-neighborhood称为点直接密度可及从核心的观点。
如果ε-neighborhood核心观点包含其他核心的点,这些点的ε-neighborhoods所有核心点ε-neighborhoods合并在一起形成一个联盟。这一过程持续进行直到没有更多的核心点可以被添加。
ε-neighborhoods联盟中所有的点密度可及从第一个核心观点。事实上,所有在欧盟从所有核心密度可及点的联盟。
所有点的结合ε-neighborhoods也称为密度连接虽然不一定是边界点可获得的从对方。一个集群最大的一组density-connected分,可以有任意形状。
点,不是核心或边界点噪音点。他们不属于任何集群。
的
clusterDBSCAN对象可以使用一个估计εk最近的邻居搜索,也可以指定值。让对象估计ε,设置EpsilonSource财产“汽车”。的
clusterDBSCAN对象可以包含歧义消除歧义的数据。范围和多普勒的例子可能模棱两可的数据。集EnableDisambiguation财产真正的消除歧义的数据。
集群检测:
创建
clusterDBSCAN对象并设置其属性。调用对象的参数,就好像它是一个函数。
了解更多关于系统对象是如何工作的,看到的系统对象是什么?
创建
描述
clusterer运算= clusterDBSCANclusterDBSCAN对象,clusterer运算,对象的默认属性值。
clusterer运算= clusterDBSCAN(名称,值)clusterDBSCAN对象,clusterer运算每个指定的属性的名字设置为指定的价值。您可以指定额外的名称-值对参数在任何顺序(Name1,Value1、……以,家)。任何未指定的属性默认值。例如,
clusterer运算= clusterDBSCAN (“MinNumPoints”3,‘ε’2,…“EnableDisambiguation”,真的,“AmbiguousDimension”[1,2]);
EnableDisambiguation属性设置为真AmbiguousDimension设置为[1,2]。
属性
使用
语法
描述
(还返回一组备用的集群id,idx,clusterids]= clusterer运算(X)clusterids,使用的phased.RangeEstimator和phased.DopplerEstimator对象。clusterids向每一个噪声点分配一个惟一的ID。
输入参数
输出参数
对象的功能
使用一个目标函数,指定系统对象™作为第一个输入参数。例如,释放系统资源的系统对象命名obj使用这个语法:
发行版(obj)
例子
集群在范围和多普勒检测
创建扩展对象的检测与测量范围和多普勒。假设最明确的范围是20米跨度和明确的多普勒扩展
赫兹,
赫兹。这个例子中包含的数据dataClusterDBSCAN.mat文件。数据矩阵的第一列代表范围,第二列表示多普勒。
输入数据包含以下扩展目标和假警报:
一个明确的目标位于
在多普勒位于一个模糊的目标
位于一个模糊的目标范围
一个模糊的目标距离和多普勒位于
5假警报
创建一个clusterDBSCAN对象和消歧不是由设置指定EnableDisambiguation来假。解出集群指数。
负载(“dataClusterDBSCAN.mat”);cluster1 = clusterDBSCAN (“MinNumPoints”3,‘ε’2,…“EnableDisambiguation”、假);idx = cluster1 (x);
使用clusterDBSCAN情节目标函数来显示集群。
情节(cluster1, x, idx)
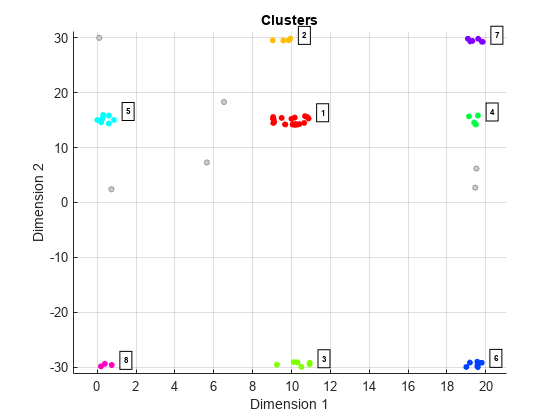
情节表明有八个明显的集群和六个噪声点。“尺寸1 '标签对应范围和“维度2》标签对应于多普勒。
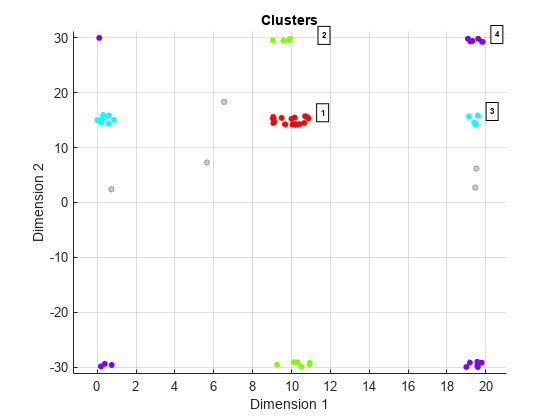
接下来,创建另一个clusterDBSCAN对象并设置EnableDisambiguation来真正的在范围和执行指定聚类多普勒模糊的界限。
cluster2 = clusterDBSCAN (“MinNumPoints”3,‘ε’2,…“EnableDisambiguation”,真的,“AmbiguousDimension”[1,2]);
使用模糊限制执行聚类,然后绘制聚类结果。DBSCAN聚类结果正确显示四个集群和五个噪声点。例如,点在范围接近零的点附近最大20米,因为明确的范围是20米。
amblims = [0 maxRange;minDoppler maxDoppler];idx = cluster2 (x, amblims);情节(cluster2 x, idx)
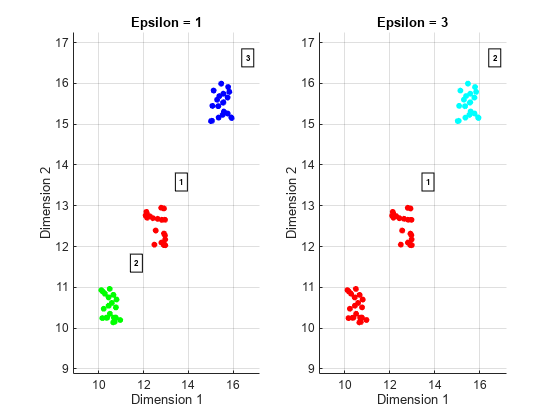
ε对聚类的影响
集群使用二维笛卡尔的位置数据clusterDBSCAN。为了说明ε的选择如何影响聚类,聚类的结果进行比较ε设置为1,ε设置为3。
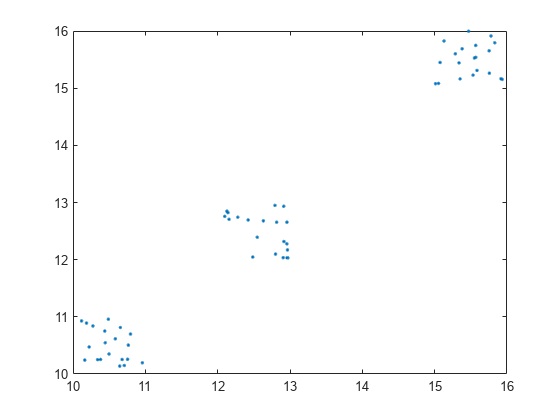
创建随机目标位置数据xy笛卡儿坐标。
2 x =[兰德(20日)+ 12;兰特(20,2)+ 10;兰德(20,2)+ 15);情节(x (: 1) x (:, 2),“。”)
创建一个clusterDBSCAN对象的ε属性设置为1MinNumPoints属性设置为3。
clusterer运算= clusterDBSCAN (‘ε’,1“MinNumPoints”3);
集群的数据时ε等于1。
idxEpsilon1 clusterer运算(x) =;
再次,但集群数据ε设置为3。你可以改变的价值ε因为它是一个可调的特性。
clusterer运算。ε=3; idxEpsilon2 = clusterer(x);
图聚类结果并排。通过传入轴处理和标题情节方法。图显示ε设置为1,三个集群出现。当ε3,两个降低集群是合并成一个。
hAx1 =情节(1、2、1);情节(clusterer运算,x, idxEpsilon1…“父”hAx1,“标题”,“ε= 1”)hAx2 =次要情节(1、2、2);情节(clusterer运算,x, idxEpsilon2…“父”hAx2,“标题”,“ε= 3”)
算法
聚类算法
本节说明了集群形成的基本原理。图中显示的点在一个二维特征空间。集群是紧凑,布置得井然有序。少数出现噪声点。

集群从核心开始点。算法的第一步是识别所有核心观点。
这里的图显示了这一点P1及其ε-neighborhoodNε(P1)。ε-neighborhood 8分(包括自己)在一个半径ε。使用
MinNumPoints属性设置阈值8意味着P1是一个核心问题。蓝色的点在撒谎Nε被称为边界点。这些边界点直接密度可及从核心观点P1。没有其他的点图中有足够的邻近点ε-neighborhood成为一个核心问题。P2不是一个核心问题,因为它在其附近只有5分。P2直接密度可及P1。相反的是不对的,因为P2不是一个核心问题。单向箭头连接两个点显示了这种不对称。
点不属于Nε(P1)噪音点(红色)和不属于集群。
因为没有其他点是核心,核心点和边界点是最大的一组density-connected点,因此形成一个集群。
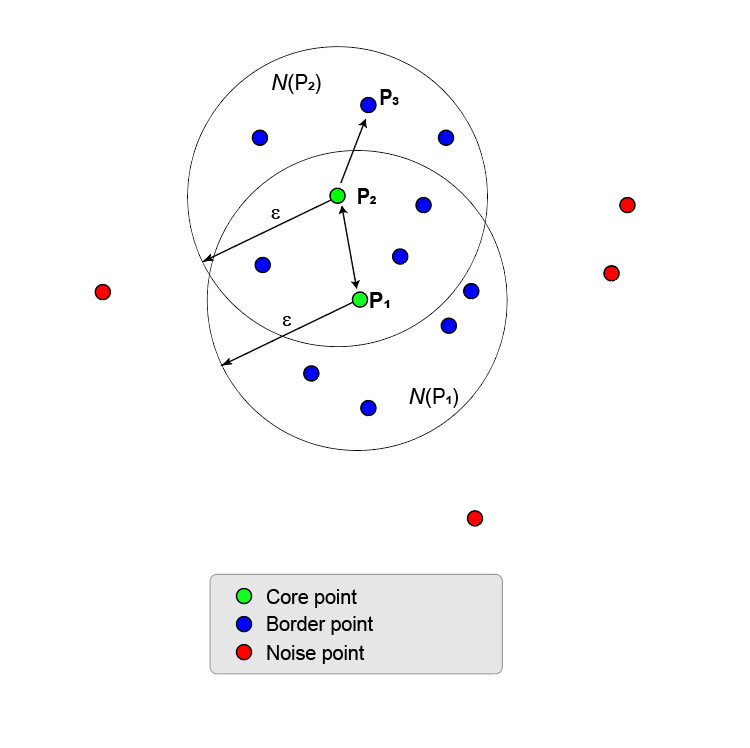
下一个图显示一个较大的点集包含两个核心要点,P1和P2。P2是一个边界点的P1但P2也有足够的点在自己的社区成为一个核心问题。因为他们都是核心,P1直接密度可及P2,P1直接密度可及P2。双向箭头显示了这个对称连接它们。

P3直接密度可及P2但不从P1(单向箭头所示)。然而,P3被称为简单密度可及从P1。
因为没有其他点核心点,两个核心要点及其边界点形成一组最大的density-connected点,形成一个集群。

这个集群成长的过程可以从核心指向核心扩展点,直到没有更多的核心指向添加。核心点和边界点属于同一集群。一般来说,一个点Pn从点密度可以吗P1当有一个连锁的核心点,P1,P2,P3、…Pn - 1这样,每个核心观点P我+ 1直接密度可及P我,Pn直接密度可及Pn1。
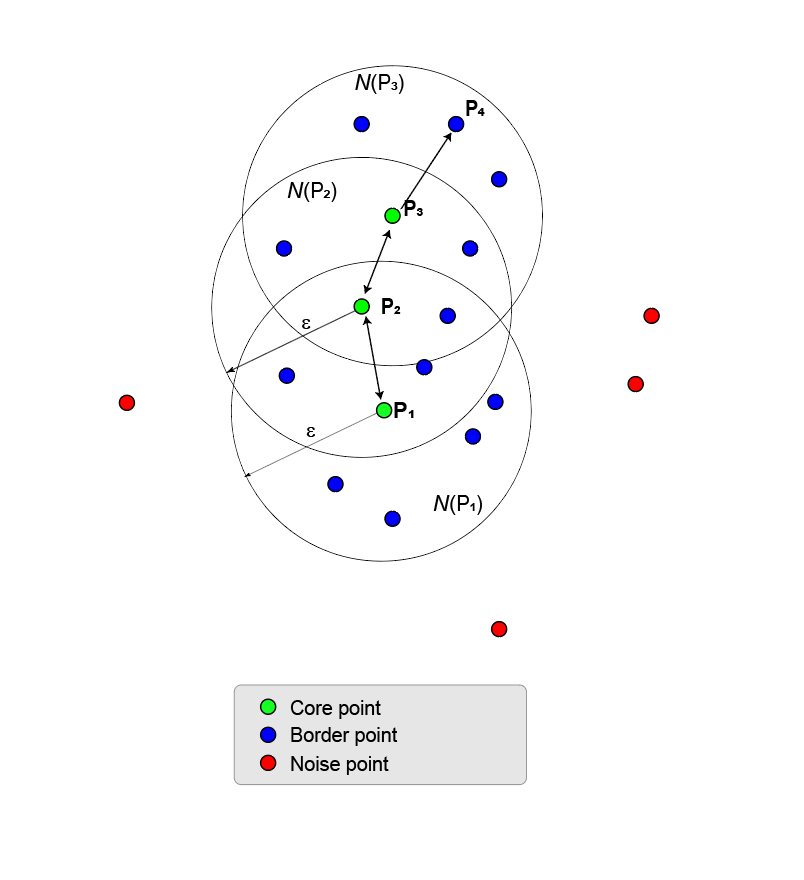
下一个图说明的一些性质密度连接。
集群可以有多个分支链,例如(P1,P2,P3,P4)和(P1,P2,P5,P6)。
两个点,P6和P4,都是密度连接当有一个第三点P2这样P6和P4密度可以从P2。
两个密度连接点不一定是密度可及。
密度最大的一组连接的点定义一个集群。并不重要,核心观点是核心的开始点。
集群中的所有点密度可及于所有核心观点。

估计ε
DBSCAN聚类需要一个值邻域大小参数ε。的clusterDBSCAN对象和clusterDBSCAN.estimateEpsilon函数使用一个k最近邻搜索来估计一个标量ε。让D任意一点的距离P对其kth最近的邻居。定义一个Dk(P)社区作为社区周围P包含它的k最近的邻居。有k+ 1分Dk(P)社区包括这一点P本身。大纲的估计算法是:
对于每个点,找到所有的点Dk(P)附近
积累的距离Dk(P所有点到一个向量)的社区。
通过增加距离排序向量。
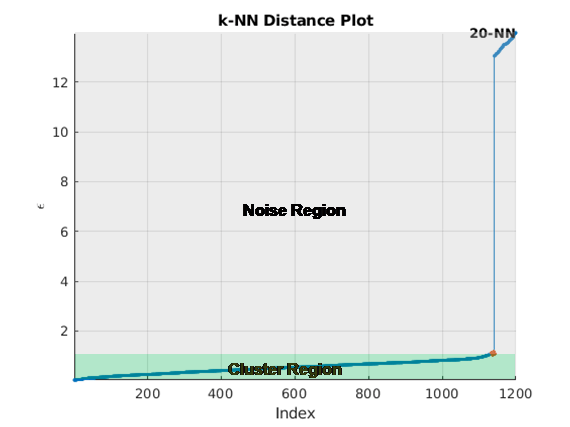
情节的排序k区域图,排序距离对点数量。
找到曲线的膝盖。距离的值在这一点上是ε的估计。
这里的图绘制对点指数显示距离k= 20。膝盖发生在大约1.5。任何低于这个阈值点属于一个集群。任何比这个值是噪音。
有几种方法来找到曲线的膝盖。clusterDBSCAN和clusterDBSCAN.estimateEpsilon首先定义线连接曲线的第一个和最后一个点。点的纵坐标排序k距离图最远的从线和垂直于行定义了ε。

当你指定一个范围k值,该算法平均估计ε值曲线。这个数字表明,ε相当迟钝k为k从14到19。
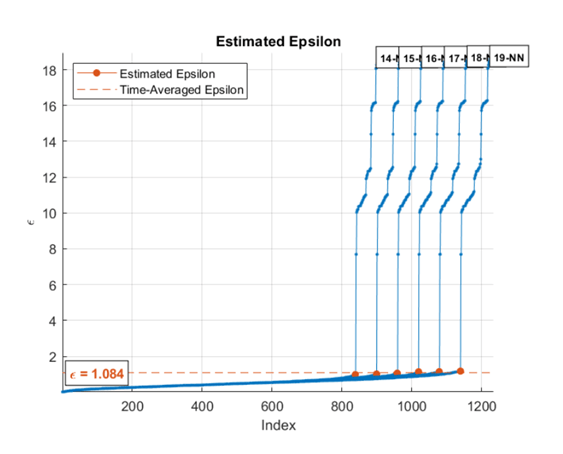
创建一个单k神经网络的距离图,设置MinNumPoints财产等于MaxNumPoints财产。
引用
[1]酯M。,Kriegel H.-P., Sander J., and Xu X. "A Density-Based Algorithm for Discovering Clusters in Large Spatial Databases with Noise".Proc。第二Int。Conf.知识发现和数据挖掘,波特兰,或AAAI出版社,1996年,第226 - 231页。
[2]埃里希·舒伯特,Jorg桑德,马丁酯,汉斯Kriegel,和徐小韦。2017。“DBSCAN重新审视,重新审视:为什么以及如何你应该(仍然)使用DBSCAN”。ACM反式。数据库系统。42、3、第十九条(2017年7月),21页。
[3]杜米尼克柯尔尼Jens Klappstein克劳斯Dietmayer,“基于网格的DBSCAN聚类扩展雷达数据对象”,2012年IEEE智能车辆研讨会。
[4]托马斯•瓦格纳Reinhard Feger,安德烈亚斯Stelzer,”一个快速的基于网格的聚类算法用于范围/多普勒/ DoA测量”,《欧洲雷达会议13日。
[5]Mihael Ankerst,马库斯·m·Breunig汉斯Kriegel, Jorg桑德,“光学:订购点识别聚类结构”,Proc。ACM SIGMOD 99年Int。Conf.管理的数据,1999年宾夕法尼亚州费城。
扩展功能
版本历史
介绍了R2021a