降阶柔性固体gydF4y2Ba
基于降阶模型的柔性体gydF4y2Ba
- 库:gydF4y2Ba
模拟场景/多体/体元素/柔性体gydF4y2Ba

描述gydF4y2Ba
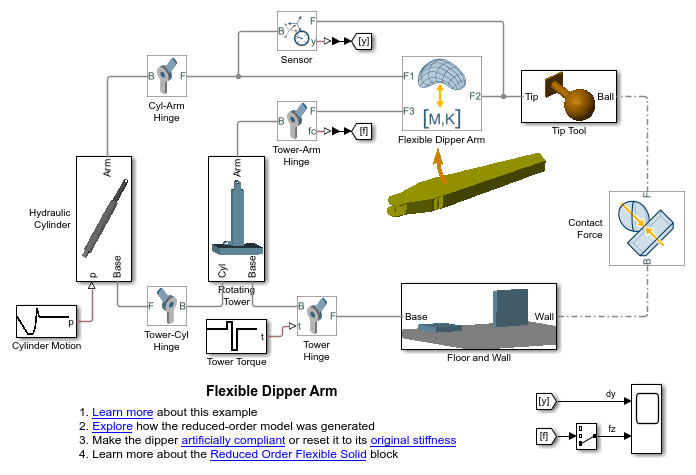
的gydF4y2Ba降阶柔性固体gydF4y2Ba块体是一种基于降阶模型的任意几何形状的可变形体。gydF4y2Ba
一个gydF4y2Ba降维模型gydF4y2Ba是一种计算效率高的模型,描述了在小变形下柔性体的力学特性。从降阶模型导入的基本数据包括:gydF4y2Ba
一个坐标三元组列表,指定了所有接口帧原点相对于一个公共参考帧的位置。看到gydF4y2Ba界面框架gydF4y2Ba.gydF4y2Ba
描述柔体弹性特性的对称刚度矩阵。看到gydF4y2Ba刚度矩阵gydF4y2Ba.gydF4y2Ba
描述柔体惯性特性的对称质量矩阵。看到gydF4y2Ba质量矩阵gydF4y2Ba.gydF4y2Ba
如果您已经有一个详细的CAD模型的组件gydF4y2BaSimscape™多体™gydF4y2Ba模型,您可以使用有限元分析(FEA)工具生成该块所需的降阶数据。例如,使用偏微分方程工具箱™,您可以从组件的CAD几何开始,生成一个有限元网格,应用Craig-Bampton FEA子结构方法,并生成一个降阶模型。有关更多信息,请参见gydF4y2Ba建立了挖掘机铲斗臂作为柔性体的模型gydF4y2Ba.gydF4y2Ba
常见的参考系gydF4y2Ba
块、降阶模型和CAD几何必须使用一致的公共参考系。这个局部引用定义gydF4y2BaxgydF4y2Ba,gydF4y2BaygydF4y2Ba,gydF4y2BazgydF4y2Ba用于指定物体中所有点的相对位置的方向。参考系还定义了与每个接口系相关联的小变形自由度(平移和旋转)的方向。gydF4y2Ba
降维模型要求gydF4y2Ba
您的降阶模型必须至少包含一个边界节点。每个边界节点决定了柔性体与其他连接的接口框架的位置gydF4y2BaSimscape多体gydF4y2Ba元素,如关节、约束、力和传感器。在简化顺序模型中指定边界节点,其顺序与块上相应的接口帧相同。gydF4y2Ba
每个边界节点必须对降阶模型贡献6个自由度。节点的自由度gydF4y2Ba我gydF4y2Ba必须按顺序保留吗gydF4y2Ba
UgydF4y2Ba我gydF4y2Ba= (gydF4y2BaTgydF4y2BaxgydF4y2Ba我gydF4y2Ba,gydF4y2BaTgydF4y2BaygydF4y2Ba我gydF4y2Ba,gydF4y2BaTgydF4y2BazgydF4y2Ba我gydF4y2Ba,gydF4y2BaRgydF4y2BaxgydF4y2Ba我gydF4y2Ba,gydF4y2BaRgydF4y2BaygydF4y2Ba我gydF4y2Ba,gydF4y2BaRgydF4y2BazgydF4y2Ba我gydF4y2Ba],gydF4y2Ba
地点:gydF4y2Ba
TgydF4y2BaxgydF4y2Ba我gydF4y2Ba,gydF4y2BaTgydF4y2BaygydF4y2Ba我gydF4y2Ba,gydF4y2BaTgydF4y2BazgydF4y2Ba我gydF4y2Ba平移自由度是沿着gydF4y2BaxgydF4y2Ba,gydF4y2BaygydF4y2Ba,gydF4y2BazgydF4y2Ba的方向。gydF4y2Ba
RgydF4y2BaxgydF4y2Ba我gydF4y2Ba,gydF4y2BaRgydF4y2BaygydF4y2Ba我gydF4y2Ba,gydF4y2BaRgydF4y2BazgydF4y2Ba我gydF4y2Ba旋转自由度是关于gydF4y2BaxgydF4y2Ba,gydF4y2BaygydF4y2Ba,gydF4y2BazgydF4y2Ba轴。gydF4y2Ba
你的模型还可以包括额外的自由度,gydF4y2BaDgydF4y2Ba1gydF4y2Ba,gydF4y2BaDgydF4y2Ba2gydF4y2Ba⋯,gydF4y2BaDgydF4y2Ba米gydF4y2Ba,对应于保留的正常振动模式。gydF4y2Ba
自由度的数目决定了刚度矩阵和质量矩阵的大小。在一个灵活的身体gydF4y2BangydF4y2Ba边界节点和gydF4y2Ba米gydF4y2Ba模态自由度,这些矩阵有gydF4y2BargydF4y2Ba= 6gydF4y2BangydF4y2Ba+gydF4y2Ba米gydF4y2Ba行和列。行和列的顺序必须与自由度的顺序相对应:gydF4y2Ba
UgydF4y2Ba减少gydF4y2Ba= (gydF4y2BaUgydF4y2Ba1gydF4y2Ba,gydF4y2BaUgydF4y2Ba2gydF4y2Ba⋯,gydF4y2BaUgydF4y2BangydF4y2Ba,gydF4y2BaDgydF4y2Ba1gydF4y2Ba,gydF4y2BaDgydF4y2Ba2gydF4y2Ba⋯,gydF4y2BaDgydF4y2Ba米gydF4y2Ba].gydF4y2Ba
模型中自由度越大,描述柔性体的矩阵越大,仿真速度越慢。gydF4y2Ba
阻尼gydF4y2Ba
为了确定柔性体的阻尼特性,该块体支持三种阻尼方法:比例阻尼、均匀模态阻尼和阻尼矩阵法。万博1manbetx有关更多信息,请参见gydF4y2Ba阻尼gydF4y2Ba.gydF4y2Ba
仿真性能gydF4y2Ba
柔性体可以增加多体模型的数值刚度。为了避免模拟问题,请使用类似于gydF4y2Baode15sgydF4y2Ba或gydF4y2Baode23tgydF4y2Ba.gydF4y2Ba
阻尼对仿真性能有显著影响。例如,当对一个只有很少或没有阻尼的物体建模时,响应中不希望出现的高频模态会减慢模拟的速度。在这种情况下,添加少量阻尼可以在不显著影响模型精度的情况下提高仿真速度。gydF4y2Ba
港口gydF4y2Ba
框架gydF4y2Ba
参数gydF4y2Ba
模型的例子gydF4y2Ba
扩展功能gydF4y2Ba
介绍了R2019bgydF4y2Ba
选择网站gydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba.gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba你也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba