将一系列响应建模为不确定系统
此示例演示如何使用鲁棒控制工具箱™ 命令ucover将一系列LTI响应建模为不确定系统。此命令有助于将不确定模型与代表系统可变性的一组频率响应相匹配,或降低现有不确定模型的复杂性,以便于使用多路同步器.
将植物变异性建模为不确定性
在第一个例子中,我们有一系列模型来描述各种操作条件下的设备行为。标称设备模型是一阶不稳定系统。
Pnom=tf(2,[1-2])
Pnom=2---s-2连续时间传递函数。
其他模型是变体Pnom.它们都有一个不稳定的单极,但该极的位置可能随运行条件而变化。
p1=Pnom*tf(1,[.061]);%额外滞后p2 = pnom * tf([ - 。02 1],[。02 1]);%延时p3=Pnom*tf(50^2,[12*.1*50^2]);%高频共振p4 = pnom * tf(70 ^ 2,[1 2 * .2 * 70 70 ^ 2]);%高频共振p5 = tf(2.4,[1 -2.2]);%极点/增益迁移p6=tf(1.6[1-1.8]);%极点/增益迁移
为了应用鲁棒控制工具,我们可以将这组模型替换为单个不确定对象模型,其行为范围包括p1通过p6.这是命令的一次使用ucover。此命令获取LTI模型数组粒子列阵和一个标称模型Pnom并对差异进行建模Parray-Pnom.作为系统动力学中的乘性不确定性。
因为ucover需要一组模型,请使用堆栈命令以收集植物模型p1通过p6合并到一个数组中。
parray =堆栈(1,p1,p2,p3,p4,p5,p6);
接下来,使用ucover“覆盖”行为范围粒子列阵具有不确定的形式模型
P=Pnom*(1+Wt*增量)
所有不确定性都集中在“未建模动态”中希腊字母表的第4个字母(一)ultidyn.因为希腊字母表的第4个字母在所有频率下均由1一致限定,即“成形”滤波器WT.用于捕获不确定性的相对量如何随频率变化。该滤波器也称为不确定性加权函数。
尝试四阶过滤器WT.为此:
orderWt=4;Parrayg=frd(Parray,logspace(-1,3,60));[P,Info]=ucover(Parrayg,Pnom,orderWt,“InputMult”);
由此产生的模型P是具有标称值的单输入、单输出不确定状态空间(USS)对象Pnom.
P
P=具有1个输出、1个输入、5个状态的不确定连续时间状态空间模型。模型不确定性由以下模块组成:Parrayg_InputMultDelta:不确定1x1 LTI,峰值增益=1,1次出现类型“P.NominalValue”查看标称值,“get(P)”查看所有属性,以及“P.NominalValue”与不确定因素相互作用。
TF(p.nominalvalue)
ans=2---s-2连续时间传递函数。
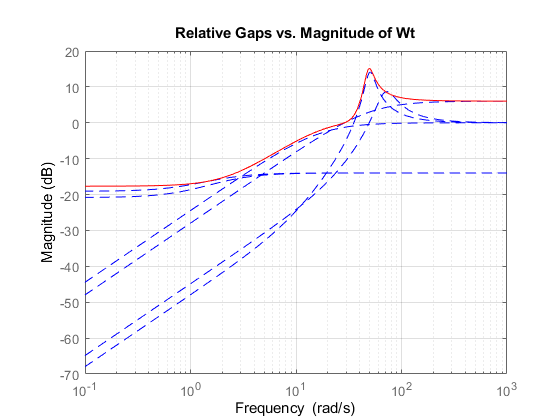
Bode震级图确认成形滤波器WT.“覆盖”植物行为的相对变化。作为频率的函数,不确定度水平为5 rad / sec(-10db = 0.3),50%,10 rad / sec,100%超过29 rad / sec。
Wt=信息W1;博德马克(Pnom帕雷)/Pnom,“b——”,Wt,“r”);网格标题('相对差距与wt'的幅度)
现在可以使用不确定模型P为原始植物型号设计强大的控制器,请参阅基于鲁棒控制的同时镇定详情请参阅。
简化现有的不确定模型
在第二个例子中,我们从植物的详细不确定模型开始。该模型由具有不确定增益和时间常数的一阶动态组成,串联具有轻度额外的谐振和显着的未拼接动态。使用该模型使用尿素的和ultidyn.用于指定不确定变量的命令:
gamma =尿尿(“伽马”2,“Perc”,30);%不确定收益tau=尿素(‘头’,1,“Perc”,30);%不确定的时间常数WN=50;席席=0.25;P=TF(γ,[Tau 1 ])* TF(WN ^ 2,[ 1×2×X*WN WN 2)];%添加未建模的动力学并将SampleStateDim设置为5以获得代表性%不确定模型P的样本值delta=ultidyn(“三角洲”,[1 1],'samplestationim',5,'边界',1); W=最大重量(0.1,20,10);P=P*(1+W*增量)
P=具有1个输出、1个输入、4个状态的不确定连续时间状态空间模型。模型不确定性包括以下模块:增量:不确定1x1 LTI,峰值增益=1,1次出现gamma:不确定实值,标称=2,可变性=[-30,30]%,1次出现tau:不确定实值,标称=1,可变性=[-30,30]%,1次出现类型“P.NominalValue”用于查看标称值,“get(P)”用于查看所有属性,“P.Undecision”用于与不确定元素交互。
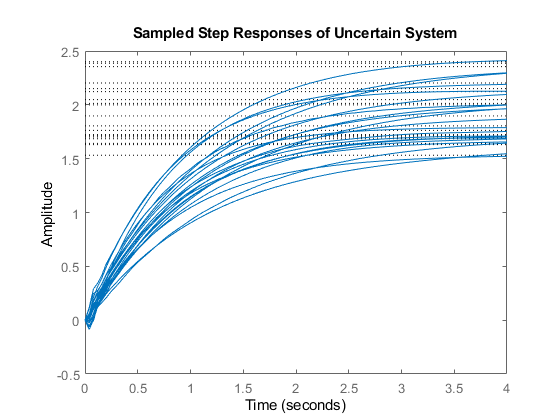
一组阶跃响应说明了植物的变异性。
步骤(P,4)标题(“不确定系统的采样阶跃响应”)
不确定的植物模型P包含3个不确定因素。出于控制设计目的,通常需要简化此不确定模型,同时大致保留其总体可变性。这是命令的另一种用途ucover.
使用ucover在此背景下,首先映射不确定模型P使用usample。此命令对不确定系统中的不确定元素进行采样,并返回相应的LTI模型,每个模型表示不确定系统的一种可能行为。在本例中,示例P在60分(随机数发生器用于可重复性):
rng(0,“龙卷风”);parray = usample(p,60);
接下来,使用ucover涵盖所有行为粒子列阵通过一个简单的不确定性模型系统电压.选择P作为封面的中心,使用二阶滤波器对未建模动态的频率分布进行建模。
orderwt = 2;parrayg = frd(parray,logspace(-3,3,60));[usys,info] = Ucover(Parrayg,P.NominalValue,Orderwt,“InputMult”);
Bode震级图显示滤波器震级(红色)如何“覆盖”电厂频率响应的相对可变性(蓝色)。
Wt=Info.W1;bodemag((P.NominalValue-Parray)/P.NominalValue,“b——”,Wt,“r”) 标题('相对差距(蓝色)与整形过滤幅度(红色)')

现在可以使用简化的不确定性模型系统电压要为原始设备设计鲁棒控制器,请参见第一割稳健设计详情请参阅。
调整不确定性权重
在第三个例子中,我们从一个2输入2输出系统的40个频率响应开始。这些数据是在各种操作条件下用频率分析仪收集的。两状态标称模型适用于最典型的响应:
A=[-510;-10-5];B=[10;01];C=[110;-101];D=0;Pnom=ss(A,B,C,D);
频率响应数据加载到FRD模型的40×1阵列中:
负载ucover_演示大小(Pdata)
FRD型号的40x1阵列。每个型号有2个输出、2个输入和120个频率点。
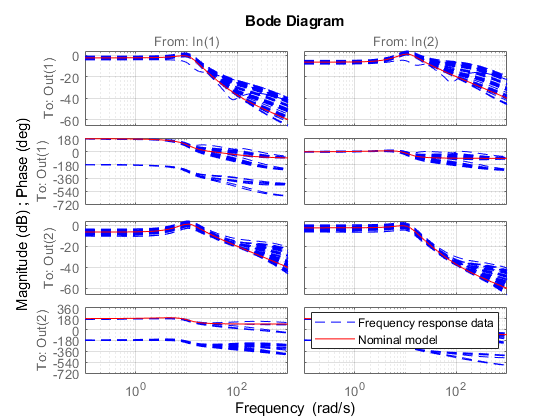
绘制此数据并叠加标称模型。
博德(Pdata,“b——”,Pnom,“r”,{。1,1e3}),网格传奇('频率响应数据','标称模型',“位置”,'东北')
由于响应可变性不大,请尝试使用以下形式的加性不确定性模型对该系列频率响应进行建模:
P=Pnom+w*Delta
哪里希腊字母表的第4个字母是一个2-by-2ultidyn.代表未确定动态的对象和W是反映不确定性频率分布的标量加权函数(Pdata中的可变性)。
从一阶滤波器开始W并比较W每个频率所需的不确定性最小:
[P1,INFOS1] = UCOVER(PDATA,PNOM,1,“添加剂”);w=InfoS1.W1;bodemag(w,“r”,InfoS1.W1opt,'G',{1e-1 1e3})标题(“标量加性不确定性模型”)传奇(“一阶w”,“最小不确定量”,“位置”,'西南')
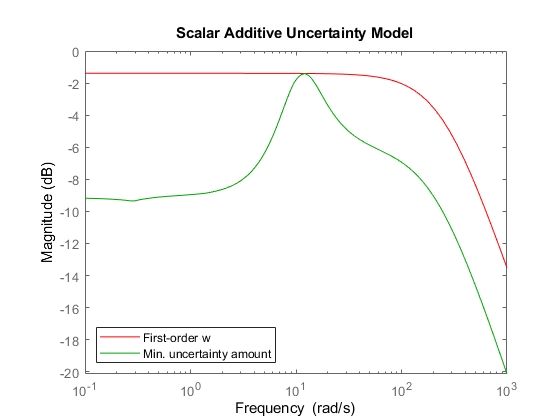
震级W应与最小不确定度量紧密匹配。很明显,一阶拟合过于保守,在大多数频率下超过此最小值。请使用三阶滤波器重试W。为了提高速度,请在中重新使用数据信息1避免在每个频率上重新计算最佳不确定性比例。
[P3,INFOS3] = UCOVER(PNOM,INFOS1,3,“添加剂”);w=InfoS3.W1;bodemag(w,“r”,InfoS3.W1opt,'G',{1e-1 1e3})标题(“标量加性不确定性模型”)传奇(“三阶w”,“最小不确定量”,“位置”,'西南')

震级W现在与最小不确定性量非常匹配。在加性不确定性模型中,P3提供中行为的详细说明pdata..注意P3共有8个状态(2个来自标称零件,6个来自W).
P3
P3 =具有2个输出的不确定连续时间状态空间模型,2个输入,8个状态。模型不确定性由以下块组成:pdata_adddelta:不确定的2x2 lti,峰值增益= 1,1次出现“p3.nominalvalue”,以查看标称值“get(p3)”以查看所有属性,以及“p3.uncterainty“与不确定的元素互动。
例如,您可以使用非标量不确定性加权函数来优化这种添加剂不确定性模型
P=Pnom+W1*Delta*W2
哪里W1和W2是2×2对角线滤波器。在此示例中,限制使用W2 = 1并允许W1的对角线条目为第三顺序。
[PM,INFOM] = UCOVER(PDATA,PNOM,[3; 3],[],“添加剂”);
比较两个参赛作品W1使用前面计算的最小不确定度。注意,在所有频率下W1其幅值远小于标量过滤器W这表明对角加权不确定性模型得出的频率响应族覆盖范围不太保守。
博德马克(InfoS1.W1opt,“g*”,...Infom.w1opt(1,1),'r--',InfoM.W1(1,1),“r”,...信息W1opt(2,2),“b——”,InfoM.W1(2,2),“b”,{1e-1 1e3});标题(“对角加法不确定性模型”)传奇(“标量最优权重”,...'W1(1,1),逐点最优',...‘W1(1,1),三阶配合’,...'W1(2,2),点亮最佳',...‘W1(2,2),三阶配合’,...“位置”,'西南')

通过考虑两个频率相关的数量,可以部分地量化一个覆盖物的保守度可以部分地量化:
Fd2s=定额(inv(W1)*w),Fs2d=定额(W1/w)
这些数量衡量需要缩放一个不确定性模型以覆盖另一个不确定性模型。例如,不确定性模型Pnom+W1*Delta需要被一个因素扩大FD2S.包括由不确定模型表示的所有模型pnom + w * delta.
情节FD2S.和Fs2d作为频率的函数。
fd2s = fnorm(infos1.w1opt * inv(Infom.w1opt));fs2d = fnorm(Infom.w1opt * inv(infos1.w1opt));SemiloGX(FNORM(FD2S),“b”,fnorm(fs2d),“r”),网格轴([0.1 1000 0.5 2.6])xlabel(‘频率(rad/s)’),伊拉贝尔(“震级”) 标题(“与不同封面相关的比例系数”)传奇(“对角到标量因子”,...'标量到对角线因子',“位置”,'西南');
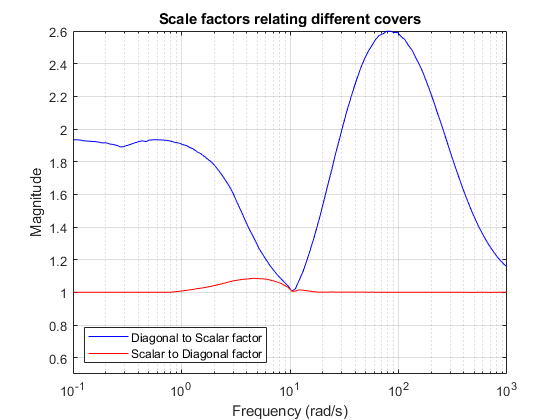
这个剧情显示:
Fs2d=1在一个大的频率范围内pnom + w * delta包括由建模的所有行为PNOM + W1 * DELTA
在相同的频率范围内,
PNOM + W1 * DELTA不包括由建模的所有行为pnom + w * delta事实上,为了做到这一点,需要将其放大1.2到2.6倍。
在频率范围[1 20]中,两个不确定性模型均不包含另一个,但在所有频率下,使
PNOM + W1 * DELTA掩蔽pnom + w * delta需要的比例因子比反之小得多。
这表明了PNOM + W1 * DELTA该模型提供了一个不太保守的覆盖频率响应数据pdata..
另见
相关话题
您还可以从以下列表中选择网站: