模拟系统和风力机叶片的模态分析
这个例子展示了如何从实验数据估计频响函数(frf)和模态参数。第一部分描述了一个模拟实验,用一系列的锤击激发一个三自由度(3DOF)系统,并记录产生的位移。估计了结构三阶模态的频响函数、固有频率、阻尼比和模态振型向量。第二部分根据风力机叶片试验得到的频响函数估计估计模态振型矢量。涡轮叶片测量配置和产生的模态振型是可视化的。这个例子需要系统识别工具箱(TM)。
模拟光束的固有频率和阻尼
单输入/单输出液压锤励磁
一系列锤击激发一个三自由度系统,传感器记录产生的位移。系统按比例阻尼,因此阻尼矩阵是质量矩阵和刚度矩阵的线性组合。
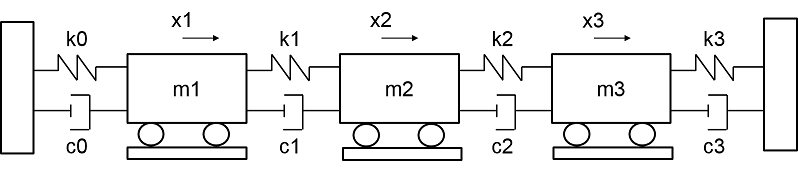
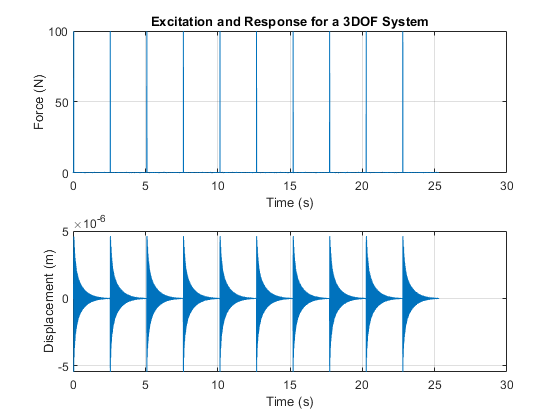
导入两组测量数据,包括激励信号、响应信号、时间信号和地面真实频率响应函数。第一组响应信号,y1.,测量第一个质量的位移,第二,Y2.,测量第二质量。每个激励信号由十个锤击串联而成,每个响应信号包含相应的位移。每个撞击信号的持续时间为2.53秒。激励和响应信号中都存在加性噪声。可视化第一次测量的第一次激励和响应通道。
[t,fs,X1,X2,Y1,Y2,f0,H0]=helperImportModalData();X0=X1(:,1);Y0=Y1(:,1);helperPlotModalAnalysisExample([t'X0 Y0]);
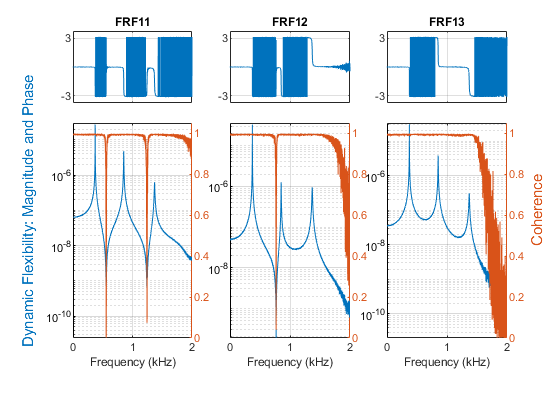
在动态灵活性方面计算并绘制FRF的第一个激励和响应信道,这是一种对力的位移量度[1]。缺省情况下,通过平均窗口段的频谱来计算FRF。由于每个锤子激发基本上衰减在下一次激励之前,因此可以使用矩形窗口。将传感器指定为位移。
winLen = 2.5275 * fs;样本中的%窗口长度modalfrf(X0,Y0,fs,winLen,'传感器',“说”)

FRF,使用默认值估计“H1”估计器,在测量的频带中包含三个显著的峰值,对应于三个灵活的振动模式。在这些峰值附近的相干性接近一个,而在反共振区域,响应测量的信噪比较低。相干性接近一表示高质量的估计“H1”当噪声只存在于输出测量时,估计是最优的,而“H2”当仅在输入[2]上存在加性噪声时,估计器是最优的“H1”和“H2”估计此FRF。
[FRF1,f1]=modalrf(X0,Y0,fs,winLen,'传感器',“说”);%计算FRF(H1)[FRF2,f2]=modalfrf(X0,Y0,fs,winLen,'传感器',“说”,'估计',“H2”);
当存在显著的测量噪声或激励较差时,参数化方法可以提供从数据中准确提取频响的额外选项。“子空间”方法首先对数据[3]拟合一个状态空间模型,然后计算它的频响函数。状态空间模型的顺序(等于极点的数量)和是否存在馈通可以指定来配置状态空间估计。
[FRF3,f3]=modalff(X0,Y0,fs,winLen,'传感器',“说”,'估计','子空间',“馈通”,对);
这里,FRF3是通过拟合一个包含馈通项的状态空间模型来估计的,该状态空间模型的阶数为1:10。比较估计的频响“H1”,“H2”和'子空间'方法采用理论频响函数法。
helperPlotModalAnalysisExample(f1、FRF1、f2、FRF2、f3、FRF3、f0、H0);
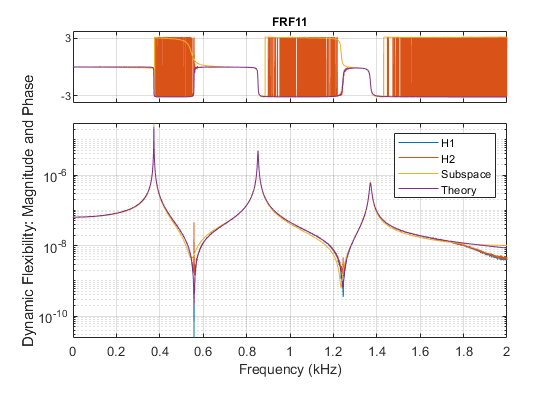
估计器在响应峰值附近的性能相当,而“H2”估计器高估了反共振时的响应。相干性不受估计器选择的影响。
接下来,使用峰值拣选算法估计每种模式的固有频率。峰值拣选算法是识别FRF中峰值的简单且快速的过程。它是一种本地方法,因为每个估计是从单个频率响应函数生成的。它也是一种自由度(SDOF)方法,因为每个模式的峰被独立地考虑。结果,为每个FRF生成一组模态参数。基于先前的绘图,指定200到1600 Hz的频率范围,该频率范围包含三个峰值。
fn=modalfit(FRF1,f1,fs,3,“FitMethod”,“PP”,'freqrange',[200 1600])
fn=1.0e+03*0.3727 0.8525 1.3707
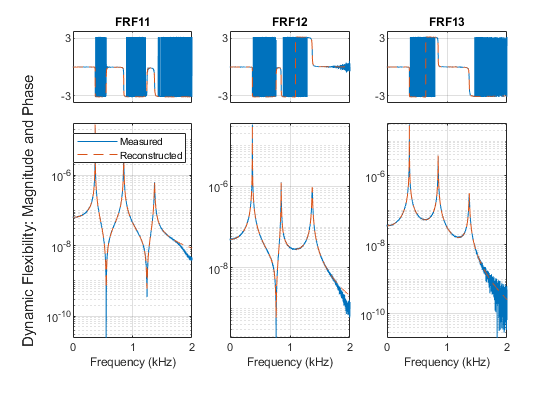
固有频率约为373、853和1371 Hz。绘制重建的FRF,并使用莫达尔菲特.使用从频率响应函数矩阵估计的模态参数来重建FRF,频1.称呼莫达尔菲特同样没有输出参数,以生成包含重构的FRF的图。
modalfit(frf1,f1,fs,3,“FitMethod”,“PP”,'freqrange',[200 1600])
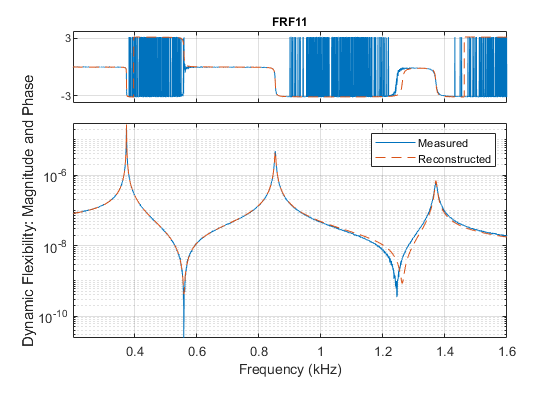
重建的频响与第一激励和响应通道的实测频响基本一致。在下一节中,将考虑另外两个激励位置。
粗纱锤激振
使用默认值计算并绘制所有三个传感器响应的FRF“H1”估计器。将测量类型指定为'ravinginpul'因为我们有粗纱锤激励。
winLen modalfrf (X1, Y1, fs,'传感器',“说”,“测量”,'ravinginpul')
在上一节中,从单个FRF计算单个模态参数集。现在,使用最小二乘复指数(LSCE)估计模态参数算法。LSCE和LSRF算法通过同时分析多个响应信号来生成单个模态参数集。这些是全局多自由度(MDOF)方法,因为所有模态的参数都是通过多个频率响应函数同时估计的。
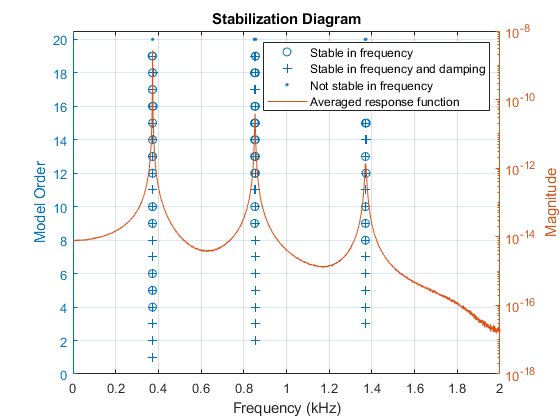
LSCE算法生成计算模式,该计算模式不是物理存在于结构中。使用稳定图来识别各种模式的稳定性,因为模式的数量增加。物理模式的自然频率和阻尼比往往存在于同一个地方,或者是“稳定”。创建稳定图并输出频率稳定的那些磁极的自然频率。
[frf,f] = modalfrf(x1,y1,fs,winlen,'传感器',“说”,“测量”,'ravinginpul');fn =模态(frf,f,fs,“最大模式”, 20岁,“FitMethod”,“lsce”);%识别物理模式

默认情况下,如果极点的固有频率变化小于百分之一,则极点被分类为频率稳定。对于阻尼比变化小于5%的情况,频率稳定的极点进一步分类为阻尼稳定。这两个标准都可以调整为不同的值。根据稳定极点的位置,选择373852.5和1371 Hz的固有频率。这些频率包含在输出中fn属于莫达尔斯德,以及其他稳频极点的固有频率。通常需要比实际存在的模态数量更高的模型阶数,才能使用lce算法产生良好的模态参数估计。在这种情况下,四个模态的模型阶数表示三个稳定极点。感兴趣的频率出现在第4行的前三列fn.
physFreq=fn(4[1,2,3]);
估计固有频率和阻尼,绘制重建和测量的FRF。指定四种模式和根据稳定性图确定的物理频率,“PhysFreq”.莫达尔菲特仅针对指定模式返回模态参数。
modalfit(frf,f,fs,4,“PhysFreq”,physfreq)
(fn1,根据dr1) = modalfit(润扬悬索桥,f, f 4“PhysFreq”,physfreq)
fn1=1.0e+03*0.3727 0.8525 1.3706 dr1=0.0008 0.0018 0.0029
接下来,计算FRF和绘制与传感器在不同位置的第二组锤击的稳定图。将稳定性标准更改为0.1%的频率和2.5%的阻尼。
润扬悬索桥[f] = modalfrf (X2, Y2、fs winLen,'传感器',“说”,“测量”,'ravinginpul');fn =模态(frf,f,fs,“最大模式”, 20岁,“SCriteria”,[0.001 0.025]);

在更严格的标准下,大多数极点被归类为频率不稳定。频率和阻尼稳定的极点与平均频响紧密对齐,表明它们存在于测量数据中。
physFreq=fn(4[1,2,3]);
为这组测量提取模态参数,并与第一组测量的模态参数进行比较。指定驱动点频响的指标,对应于激励和响应测量重合的位置。固有频率一致在1%以内,阻尼比一致在4%以内,表明模态参数从测量到测量是一致的。
[fn2, dr2] = modalfit(润扬悬索桥,f, f 4“PhysFreq”,physfreq,“DriveIndex”[1, 2])
FN2 = 1.0E + 03 * 0.3727 0.8525 1.3705 DR2 = 0.0008 0.0018 0.0029
tdiff2 =表((fn1-fn2)./ fn1,(dr1-dr2)./ dr1,“变化无常”,{“diffFrequency”,'diffdamping'})
Tdiff2=3x2表差频差阻尼__________________________________
当频响中存在测量噪声或频响具有较高的模态密度时,模态参数估计的参数化方法可以提供一个有用的选峰方法和lce方法。最小二乘有理函数(LSRF)方法将共享分母传递函数拟合到多输入、多输出频响中,从而得到模态参数[4]的单一全局估计。使用LSRF方法的过程与使用lce方法的过程类似。您可以使用稳定图来识别静止模态,并提取与识别的物理频率相对应的模态参数。
[frf,f] = modalfrf(x1,y1,fs,winlen,'传感器',“说”,“测量”,'ravinginpul');fn =模态(frf,f,fs,“最大模式”, 20岁,“FitMethod”,“lsrf”);%使用LSFR识别物理模式physFreq=fn(4,[1,2,3]);[fn3,dr3]=modalfit(FRF,f,fs,4,“PhysFreq”,physfreq,“DriveIndex”(1 - 2),“FitMethod”,“lsrf”)
FN3 = 372.6832 372.9275 852.4986 DR3 = 0.0008 0.0003 0.0018
tdiff3 =表((fn1-fn3)./ fn1,(dr1-dr3)./ dr1,“变化无常”,{“diffFrequency”,'diffdamping'})
Tdiff3=3x2表频差阻尼0.56255 0.83086 0.37799 0.37626
关于参数方法的最后一点说明:FRF估计方法(“子空间”)和模态参数估计方法(“lsrf”)与系统识别工具箱中用于将动态模型拟合到时域信号或频率响应函数的工具类似。如果您有此工具箱可用,则可以使用以下命令识别模型以适合您的数据TFEST.和ssest.您可以使用识别模型的质量使用比较和剩余物命令。一旦验证了模型的质量,就可以使用它们来提取模态参数。这是用状态空间估计器简单地展示的。
ts = 1 / fs;%采样时间%创建用于模型估计的数据对象。EstimationData = iddata(Y0(1:1000), X0(1:1000), 1/fs);%创建用于模型验证的数据对象ValidationData = iddata(Y0(1001:2000), X0(1001:2000), 1/fs);
识别一个包含馈通项的6阶连续时间-状态-空间模型。
sys = ssest(估计data,6,“馈通”,对)
SYS =连续时间识别的状态空间模型:DX / DT = A x(t)+ B u(t)+ k e(t)y(t)= c x(t)+ d u(t)+ d u(t)+ e(t)a = x1 x2 x3 x4 x5 x6 x1 4.05 -1765 149.8 -1880 -49.64 -358 x2 1764 -0.3332 2197 -232.5 -438.3 -128.4 x3 -152.4 -2198 2.85 4715 21.9 547.5 x4 1879 228.2 -4713 -15.9 -1216-28.5 1210.05.05 -8508 x6 363.7 120.2-545.4 -92.45 x3 4.439 x4 -1.911 x3 4.439 x3 4.439 x3 4.439 x3 4.439 x3 4.439 x3 4.439 x3 4.439 x4 -3.118 x5 x4 -3.118 x6 -0.9416 x6 -0.9416 x6 -8.039 c = x1 x2 x3 x4 x5 x6Y1 3.135E-05 2.511E-06 8.634E-06 -1.416E-05 2.218E-06 -6.271C-06 D = U1 Y1 7.564E-09 K = Y1 x1 3.513e + 07 x2-3.244e + 06 x3-3.598e + 07 x4 -1.059e + 07 x5 1.724e + 08 x6 7.521e + 06参数化:免费表格(A,B,C中的所有系数)。馈通:是干扰组件:估计自由系数的数量:55使用“idsdata”,“getpvec”,“getcov”参数及其不确定性。状态:使用SSEST上的时域数据“验证数据”估计。适合估算数据:99.3%(预测焦点)FPE:1.235E-16,MSE:1.189E-16
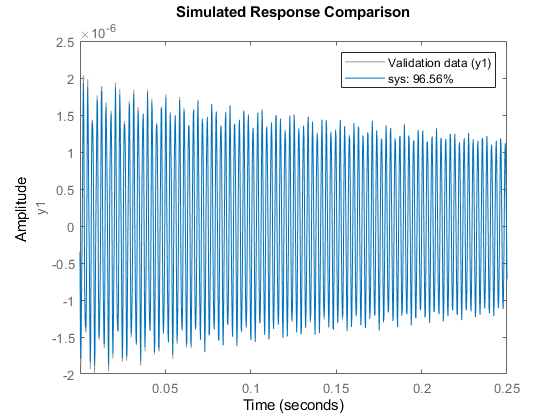
通过检查模型与验证数据的拟合程度来评估模型的质量。
clf比较(验证数据,系统)%plot显示出良好的合适
使用模型系统计算模态参数。
[Fn4,DR4] = Modalfit(SYS,F,3);
风力机叶片的模态形状矢量
了解风力涡轮机叶片的动态行为对于优化运行效率和预测叶片故障非常重要。本节分析风力涡轮机叶片的实验模态分析数据,并可视化叶片的振型。锤子在20个位置激励涡轮机叶片,参考加速计测量在位置18处的响应。在叶片的底部安装铝块,叶片在叶片方向上被激发,垂直于叶片的平坦部分。An FRF被收集到每个位置。FRF数据由麻州大学的结构动力学和声学系统实验室提供,首先,想象测量位置的空间排列。

负荷和绘图风力涡轮机叶片频响估计位置18和20。放大前几个峰值。
[frf,f,fs] = helperimportmodaldata();Helperplotmodalanalysisexample(FRF,F,[18 20]);
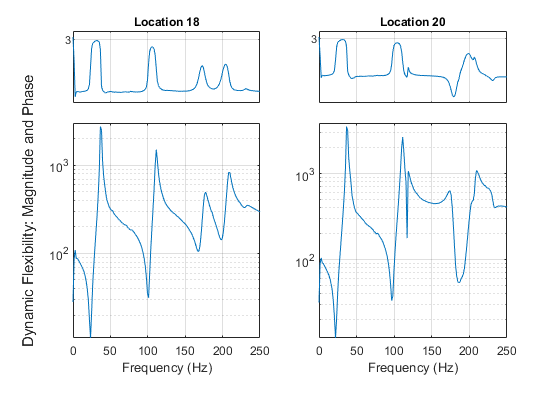
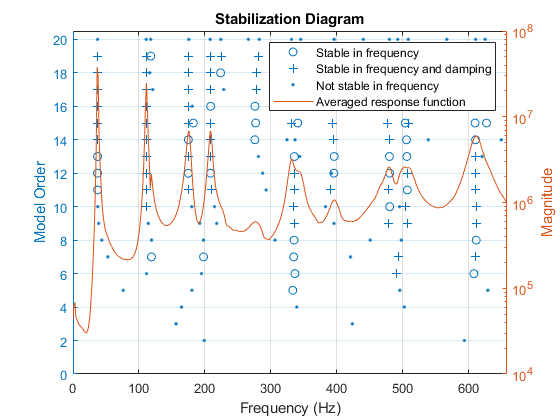
前两个模式显示为37 Hz和111 Hz附近的峰值。绘制稳定图以估计固有频率。对于14阶模型,返回的前两个值在频率和阻尼比方面是稳定的。
fn =模态(frf,f,fs,“最大模式”,20); physFreq=fn(14[12]);
接下来,使用以下命令提取前两个模式的振型:莫达尔菲特.根据前面的图,限制适合的频率范围从0到250hz。
[~, ~,女士]= modalfit(润扬悬索桥,f, f, 14日“PhysFreq”,physfreq,'freqrange',[0 250]);
振型量化结构在每个位置的每个振型的运动幅度。要估计振型向量,需要一行或一列频率响应函数矩阵。实际上,这意味着结构的每个测量位置都需要激励(在这种情况下,是一个粗纱锤),或每个位置都需要进行响应测量。可通过检查FRF的虚部来可视化振型。绘制叶片一侧位置的FRF矩阵虚部瀑布图。将频率范围限制在最大150 Hz,以检查前两个振型。图中的峰值代表发送模式形状。
measlocs=[3 6 9 11 13 15 17 19 20];%叶片边缘的测量位置HelperplotModalanAlysisexample(FRF,F,Measlocs,150);
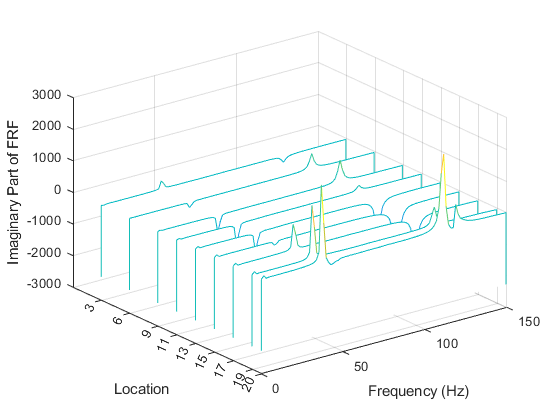
图中由峰值轮廓表示的形状表示叶片的第一和第二弯曲力矩。接下来,绘制相同测量位置的振型向量大小。
helperPlotModalAnalysisExample(ms、measlocs);
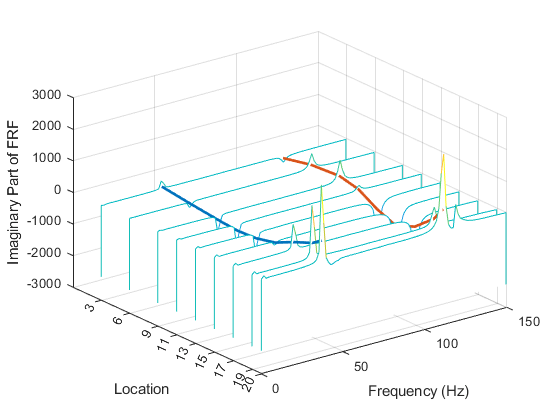
虽然幅度以不同的方式缩放(模式形状向量缩放到单位模态A),但模式形状轮廓以形状相提并。第一模式的形状具有大的尖端位移和两个节点,其中振动幅度为零。第二模式还具有大的尖端位移,并且具有三个节点。
总结
本实例对粗纱锤激励下的三自由度系统的模态分析仿真数据集进行了分析和比较。它估计的固有频率和阻尼使用稳定图和lce和LSRF算法。模态参数在两组测量中是一致的。在一个单独的用例中,风力涡轮机叶片的模态振型使用频响矩阵的虚部和模态振型向量来可视化。
致谢
感谢麻州大学洛厄尔的结构动力学和声学系统实验室的Peter Avitabile博士,以便于收集风力涡轮机叶片实验数据。
工具书类
[1] Brandt,Anders。噪声和振动分析:信号分析和实验程序.英国奇切斯特:约翰·威利父子公司,2011。
[2] 沃尔德、赫瓦尔德、约翰·克劳利和G.托马斯·罗克林,《估计频率响应函数的新方法》声音和振动.卷。1984年11月18日,第34-38页。
[3] Peter Van Overschee和Bart De Moor.“N4SID:识别组合确定性随机系统的子空间算法。”自动的.第30卷,1994年1月,第75-93页。
[4] 通过向量拟合在系统辨识工具箱中的传递函数估计国际自动控制联合会第20届世界大会论文集2017年7月,法国图卢兹。
另见
您还可以从以下列表中选择网站:
