modalfit.
频率响应函数的模态参数
语法
描述
[___] = modalfit(估计识别模型的模态参数sys,f,m,名称,价值)sys.使用以下估算命令SSEST.(系统识别工具箱)或者特遣部队(系统识别工具箱)创造sys从测量的频响函数或时域输入和输出信号开始。此语法允许使用“DriveIndex”,“FreqRange”, 和'physfreq'名称值对参数。它通常需要比使用非参数方法的语法更少的数据。您必须具有系统识别工具箱™许可证以使用此语法。
例子
SISO系统的频率响应函数
估计一个简单的单输入/单输出系统的频响函数,并将其与定义进行比较。
一维离散时间振动系统由一个单位质量, ,用弹性常数的弹簧连接到墙壁上 .传感器测量物体在点处的位移 赫兹。通过施加与速度成比例的力,阻尼器阻碍质量的运动,随着速度的阻尼恒定 .

生成3000个时间样本。定义采样间隔 .
FS = 1;dt = 1 / fs;n = 3000;t = dt *(0:n-1);b = 0.01;
系统可以由状态空间模型描述
在哪里 是国家矢量, 和 分别为质量的位移和速度, 是驱动力,而且 是测量的输出。状态空间矩阵是
是个 标识和连续时间空间矩阵是
AC = [0 1; -1-B];A = EXPM(AC * DT);BC = [0; 1];B = AC \(A-EYE(2))* BC;c = [1 0];d = 0;
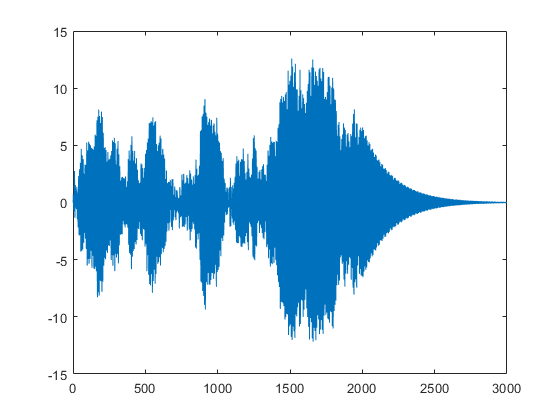
质量在前2000秒由随机输入驱动,然后返回静止状态。利用状态空间模型计算系统从全零初始状态开始的时间演化。画出质量的位移随时间的函数。
RNG.默认u = randn (1, N) / 2;u(2001:结束)= 0;y = 0;x = (0, 0);为了k = 1:n y(k)= c * x + d * u(k);x = a * x + b * u(k);结尾情节(t,y)
估计系统的模态频率响应功能。只要测量的信号,使用Hann窗口一半。指定输出是质量的位移。
风=汉恩(n / 2);[FRF,F] = Modalfrf(U',Y',FS,Wind,'传感器',“说”);
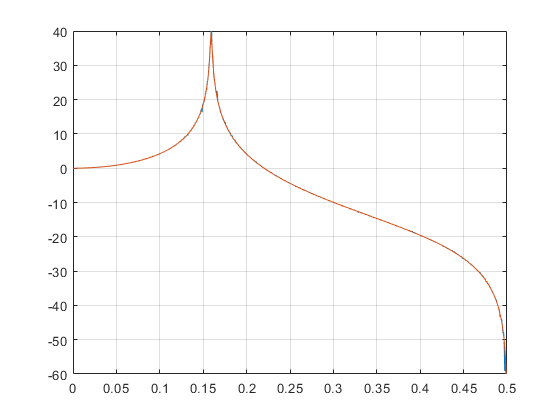
离散时间系统的频率响应函数可以表示为系统的时域传递函数的z变换,在单位圆圈中评估。比较modalfrf.用定义进行估计。
[B,A] = SS2TF(A,B,C,D);nfs = 2048;fz = 0:1 / nfs: 1/2-1 / nfs;z = exp (2 j *π* fz);ZTF = Polyval(B,Z)./ Polyval(A,Z);绘图(F,20 * log10(ABS(FRF)))保持在绘图(FZ * FS,20 * log10(ABS(ZTF)))保持离开网格ylim (40 [-60])
估计振动模式的固有频率和阻尼比。
博士(fn) = modalfit(润扬悬索桥,f, f, 1'fitmethod','pp')
FN = 0.1593.
DR = 0.0043.
比较自然频率 ,这是无法拆除系统的理论值。
西奥= 1 /(2 *π)
西奥= 0.1592
模态参数的最小二乘有理函数法
从频率响应函数(FRF)阵列开始计算空间站模块的模态参数。
加载一个包含三输入三输出频响数组的结构。系统采样频率为320 Hz。
加载modaldata.SpaceStationFRFfrf = spacestationfrf.frf;f = spacestationfrf.f;fs = spacestationfrf.fs;
采用最小二乘有理函数法提取最小24阶模态参数。
[Fn,DR,MS,OFRF] = MODALFIT(FRF,F,FS,24,'fitmethod','lsrf');
将重建的频响阵列与实测频响阵列进行比较。
为了IJ = 1:3为了霁= 1:3次要情节(3,3,3 * (ij-1) +霁)重对数(f, abs(润扬悬索桥(:,霁,ij)))在重对数(f, abs (ofrf(:,霁,ij)))离开轴紧的标题(Sprintf('以%d - > out%d',ij,ji))如果ij == 3 xlabel('频率(Hz)')结尾结尾结尾

二体振荡器的模态参数
估计一个简单的多输入/多输出系统的频响函数和模态参数。
理想的一维振荡系统由两个群众组成, 和 ,限制在两个墙之间。单位是这样的 和 .每个物体都由一个有弹性常数的弹簧连接到最近的壁上 .一个相同的弹簧把两个物体连接起来。三个阻尼器通过施加与速度成比例的力,以阻尼常数阻碍质量的运动 .传感器样本 和 ,质量的位移,在 赫兹。

生成30000个时间样本,相当于600秒。定义采样间隔 .
FS = 50;dt = 1 / fs;n = 30000;t = dt *(0:n-1);
系统可以由状态空间模型描述
在哪里 是国家矢量, 和 分别是位置和速度 th质量, 是输入驱动力的矢量,和 是输出矢量。状态空间矩阵是
是个 标识和连续时间空间矩阵是
集 , , 和 .
k = 400;b = 0.1;m = 1/10;AC = [0 1 0 0; -2 * k -2 * b k b; 0 0 0 1; k / m b / m -2 * k / m -2 * b / m];A = EXPM(AC * DT);BC = [0 0; 1 0; 0 0; 0 1 / m];B = AC \(A-EYE(4))* BC;C = [1 0 0 0; 0 0 1 0];d =零(2);
群众通过整个测量的随机输入驱动。利用状态空间模型计算系统从全零初始状态开始的时间演化。
RNG.默认U = Randn(2,N);y = [0; 0];x = [0; 0; 0; 0];为了N = y(:,kk) = C*x + D*u(:,kk);x = A*x + B*u(:,kk);结尾
利用输入和输出数据估计系统的传递函数作为频率的函数。使用一个15000样本的Hann窗口,其中包含9000个相邻片段之间的重叠样本。指定测量的输出是位移。
风=汉恩(15000);nove = 9000;[FRF,F] = Modalfrf(U',Y',FS,Wind,Nove,'传感器',“说”);
计算理论传递函数作为时域传递函数的z变换,在单位圆处计算。
nfs = 2048;fz = 0:1 / nfs: 1/2-1 / nfs;z = exp (2 j *π* fz);(b1, a1) = ss2tf (A, B, C, D, 1);(b2 a2) = ss2tf (A, B, C, D, 2);频(1:1)= polyval (b1 (1:), z)。/ polyval (a1, z);频(1:2)= polyval (b1 (2:), z)。/ polyval (a1, z);频(2:1)= polyval (b2 (1:), z)。/ polyval (a2, z);频(2:2)= polyval (b2 (2:), z)。/ polyval (a2, z);
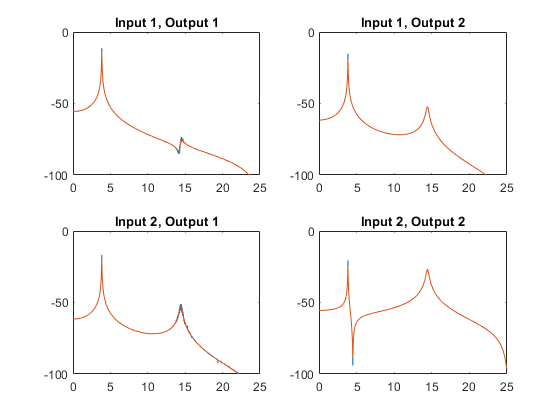
画出估算值并叠加理论预测。
为了jk = 1:2为了KJ = 1:2子图(2,2,2 *(JK-1)+ KJ)图(F,20 * log10(ABS(FRF(:,JK,KJ))))在图(FZ * FS,20 * log10(ABS(FRF(JK,:,KJ)))))保持离开轴([0 Fs/2 -100 0]) title(sprintf('输入%d,输出%d',jk,kj))结尾结尾
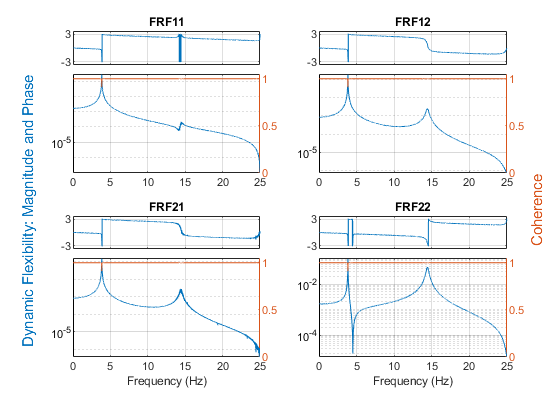
使用的语法绘制估计modalfrf.没有输出参数。
图modalfrf(U',Y',FS,Wind,Nove,'传感器',“说”)
估计系统的自然频率,阻尼比率和模式形状。使用峰值拣选方法进行计算。
(fn,博士、女士)= modalfit(润扬悬索桥,f, f 2'fitmethod','pp');fn
Fn = Fn(:,:,1)= 3.8466 3.8466 3.8495 3.8495 3.8495 3.8495 FN(:,:2)= 3.8492 3.8490 3.8552 3.8552 14.4684
比较固有频率与理论预测的无阻尼系统。
undlamed = sqrt(eig([2 * k-k; -k / m 2 * k / m]))/ 2 / pi
undamped =2×13.8470 14.4259
MIMO系统的模态参数
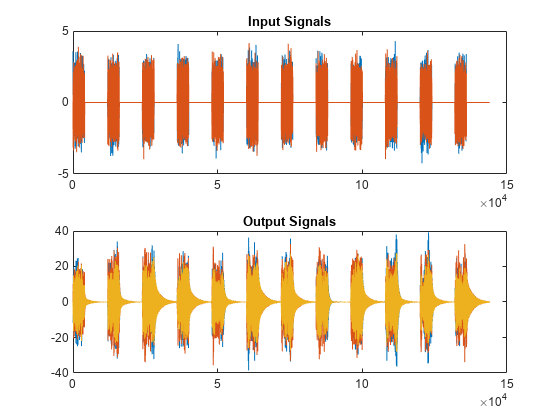
计算由几阵随机噪声激发的二输入三输出系统的固有频率、阻尼比和模态振型。每次爆发持续1秒,每次爆发的结束和下一次爆发之间有2秒。数据以4千赫采样。
加载数据文件。绘制输入信号和输出信号。
加载modaldata.次要情节(2,1,1)情节(Xburst)标题('输入信号') subplot(2,1,2) plot(Yburst) title('输出信号')
计算频率响应函数。指定长度等于突发周期的矩形窗口,邻接段之间没有重叠。
burstLen = 12000;润扬悬索桥[f] = modalfrf (Xburst Yburst, fs, burstLen);
可视化稳定图表并返回稳定的固有频率。指定最多30种模式的模型顺序。
图模态(FRF,F,FS,'maxmodes',30);
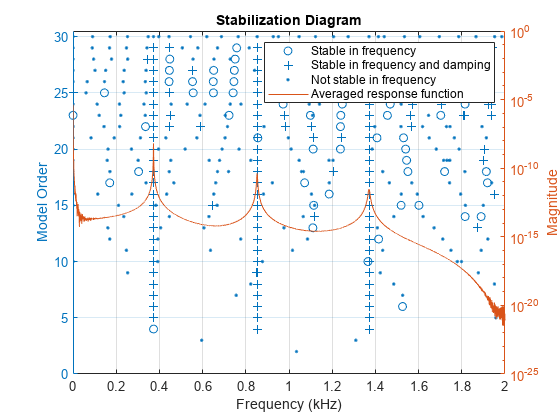
放大情节。平均响应函数在373 Hz、852 Hz、1371 Hz有最大值,分别对应系统的物理频率。将maxima保存到一个变量中。
PHFR = [373 852 1371];
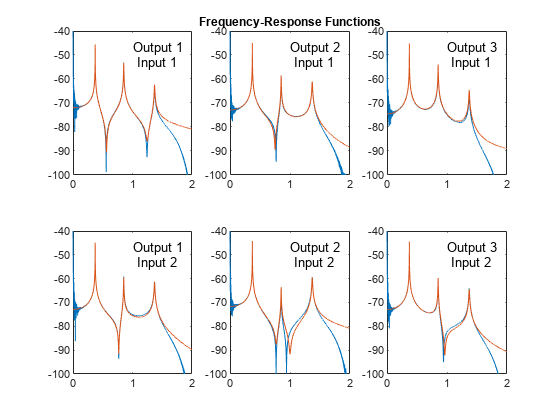
使用最小二乘复指数(LSCE)算法计算模态参数。指定6种模式的模型顺序,并指定从稳定图中确定的3种模式的物理频率。该函数为每个输入参考产生一组固有频率和阻尼比。
[Fn,Dr,MS,OFRF] = ModalFit(FRF,F,FS,6,'physfreq',phfr);
绘制重建的频率响应函数并将它们与原始函数进行比较。
为了k = 1:2为了m = 1:3子图(2,3,M + 3 *(K-1))图(F / 1000,10 * log10(ABS(FRF(:,m,k))))在绘图(F / 1000,10 * log10(ABS(ABS(OFRF(:,M,K))))保持离开文字(1,-50,[[“输出”;“输入”num2str([m k]')) ylim([-100 -40])结尾结尾次要情节(2、3、2)标题('频率响应函数')
输入参数
输出参数
算法
参考
兰德尔·J·阿勒芒和大卫·l·布朗。实验模态分析和动态分量综合,第三卷:模态参数估计。技术报告afwal - tr - 87 - 3069。空军赖特航空实验室,赖特-帕特森空军基地,OH, 1987年12月。
[2] Brandt,Anders。噪声和振动分析:信号分析和实验程序.奇切斯特,英国:John Wiley&Sons,2011年。
[3] Ozdemir,Ahmet Arda和Suat Gumussoy。“通过矢量拟合在系统识别工具箱中传递函数估计。”国际自动控制联合会第20届世界大会论文集,图卢兹,法国,2017年7月。
也可以看看
modalfrf.|莫奈德|est|n4sid.(系统识别工具箱)|特遣部队(系统识别工具箱)
话题
- 识别模型的模态分析
- 系统识别概述(系统识别工具箱)
- 系统识别工作流程(系统识别工具箱)
- 万博1manbetx支持的连续和离散时间模型(系统识别工具箱)
您还可以从以下列表中选择一个网站:
