主要内容
识别模型的模态分析
识别系统的状态空间模型。使用模型计算频率响应函数和模态参数。此示例需要系统识别工具箱™许可证。
锤子刺激
加载包含在4 kHz的三输入/三输出锤激励数据的文件。使用第一个
用于估计和样品的样品
到目前为止
用于模型质量验证。将采样时间指定为采样率的倒数。将数据存储为@iddata.对象。
加载modaldata.Xhammermiso1.Yhammermiso1.FS.休息= 1:1E4;rval = 2e4:5E4;ts = 1 / fs;估计= iddata(yhammermiso1(休息,:),xhammermiso1(休息,:),ts);验证= iddata(yhammermiso1(rval,:),xhammermiso1(rval,:),ts,'tstart',rval(1)* ts);
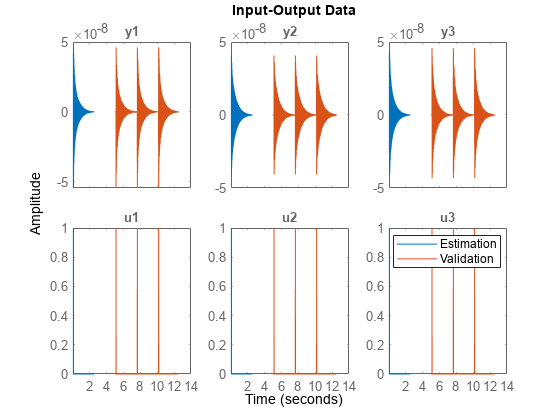
绘制估计数据和验证数据。
情节(估算,验证)传奇(GCA,“秀”)
用来SSEST.函数来估计系统的7阶状态空间模型,最小化测量输出和模型输出之间的模拟误差。指定状态空间模型具有馈通。
订单= 7;opt = ssestoptions(“焦点”那'模拟');sys = ssest(估计,订单,'喂养',真实,'ts',ts,选择);
(找到在精度和复杂性之间提供最佳权衡的模型顺序,设置订单到目前为止1:15在以前的代码中。SSEST.输出奇异值的日志图,允许您以交互方式指定订单。该函数还建议提供7.)的模型顺序

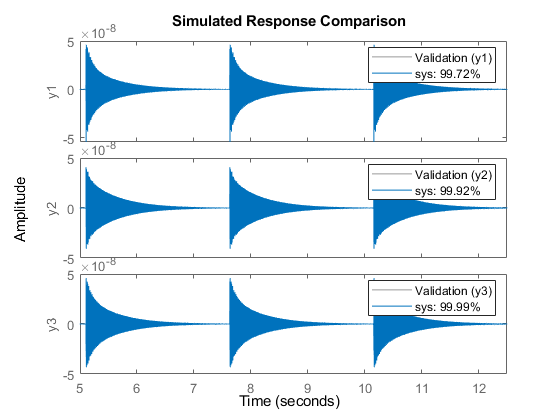
验证验证数据集上的模型质量。绘制归一化的根均匀平方误差(NRMSE)尺寸的健康尺寸。该模型准确地描述了验证数据的输出信号。
比较(验证,sys)
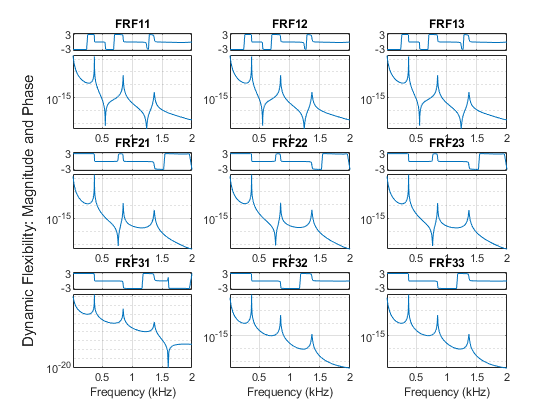
估计模型的频率响应函数。使用函数使用modalfrf.没有输出参数。
[frf,f] = modalfrf(sys);modalfrf(sys)
假设系统使用三种模式良好地描述。计算三种模式的自然频率,阻尼比和模式形状矢量。
模式= 3;[Fn,DR,MS] = ModalFit(SYS,F,MODES)
Fn =3×110.3.×0.3727 0.8525 1.3706
博士=3×10.0008 0.0018 0.0029
MS =3×3复合物0.0036 - 0.00111110.0039 - 0.0005i 0.0021 + 0.0006i 0.0043 - 0.0023i 0.0010 - 0.0001i -0.0033 - 0.0010i 0.0040 - 0.0021I -0.0031 + 0.0004i 0.0011 + 0.0003i
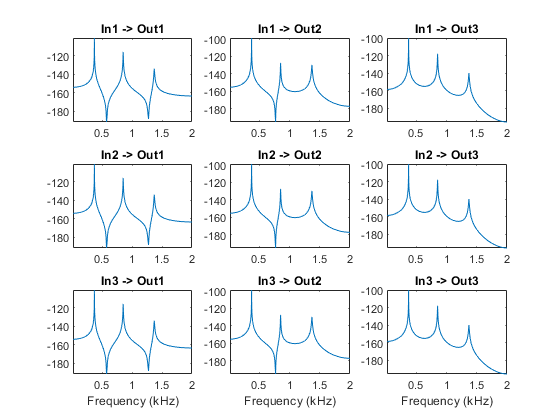
计算并显示重建的频率响应函数。在分贝中表达大小。
[〜,〜,〜,OFRF] = ModalFit(SYS,F,MODES);CLF.对于IJ = 1:3对于JI = 1:3子图(3,3,3 *(IJ-1)+ JI)绘图(F / 1000,20 * log10(ABS(ABS(:,ji,ij)))轴紧标题(Sprintf('以%d - > out%d',ij,ji))如果ij == 3 xlabel('频率(kHz)')结束结束结束
控制不稳定的过程
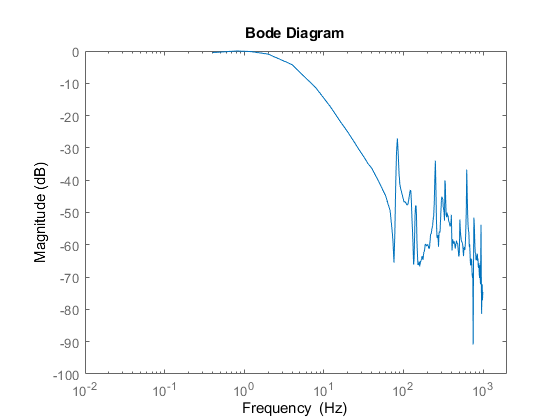
加载包含高模态密度频率响应测量的文件。数据对应于使用反馈控制在平衡处保持不稳定的过程。将数据存储为IDFRD.用于识别的对象。绘制Bode图。
加载highmodaldensdata.FRF.F.g = idfrd(erfute(frf,[2 3 1]),f,0,'surfordunit'那'赫兹');图Bodemag(g)XLIM([0.01,2e3])
识别带32个极点和32个零的传递函数。
sys = tfest(g,32,32);
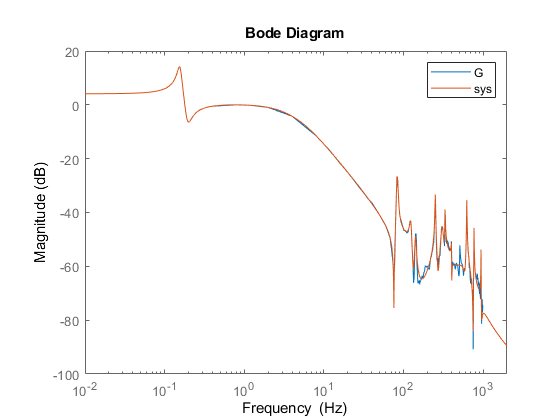
将模型与测量响应的频率响应进行比较。
Bodemag(g,sys)xlim([0.01,2e3])传奇(GCA,“秀”)
提取第一10个最小阻尼振荡模式的自然频率和阻尼比。将结果存储在表中。
[Fn,DR] = Modalfit(SYS,[],10);T =表((1:10)',FN,DR,'variablenames',{'模式'那'频率'那'阻尼'})
t =10×3表模式频率阻尼____ _________ _________ 1 82.764 0.011304 2 85.013 0.015632 3 124.04 0.025252 4 142.04 0.017687 5 251.46 6 0.0062182 0.0058266 332.79 7 401.21 8 0.0043645 0.0039247 625.14 9 770.49 10 0.002795 0.0019943 943.64
另请参阅
您还可以从以下列表中选择一个网站:
