党卫军
使用时域或频域数据估计状态空间模型
句法
描述
估计状态空间模型
例子
状态空间模型
估算状态空间模型,并将其与测量输出进行响应。
加载存储在存储中的输入输出数据iddata对象。
负载iddata1z1
估计一个四阶状态空间模型。
nx = 4;sys = ss (z1, nx);
将模拟模型响应与测量输出进行比较。
比较(z1, sys)
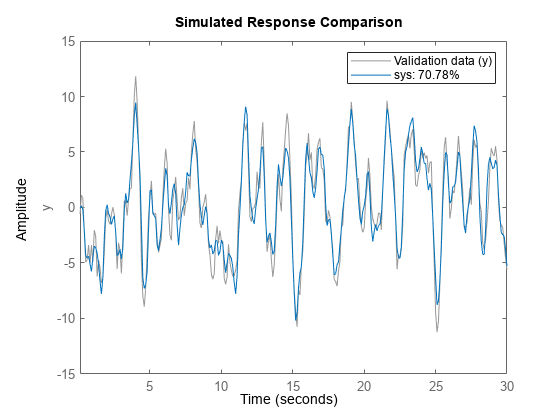
图中显示,模拟模型与估计数据的拟合率大于70%。
您可以通过探索有关估算的更多信息来探索IDS.财产sys。报告.
sys。报告
ANS =状态:'使用预测焦点的SSEST估计)方法:'SSEST'INITIONSTATE:'零'N4重量:'CVA'N4HORIZON:[6 10 10] FIT:[1x1 struct]参数:[1x1结构]选项已使用:[1x1IDOPTIONS.SSEST] RANDSTATE:[] DATAUSED:[1x1结构]终止:[1x1 struct]
例如,查找有关终止条件的更多信息。
sys.Report.Termination
ans =结构体字段:Whewalstop:'没有沿着搜索方向的改进,线索搜索。迭代:7 FirstOrderProptimality:85.9759 Fcncount:123 UpdateNorm:9.5270 Lastimprevent:0
该报告包括关于迭代次数和估计停止迭代的原因的信息。
确定最优估计模型顺序
加载输入-输出数据z1,存储在iddata对象。这是用来估计四阶模型的相同数据状态空间模型.
负载iddata1z1
通过指定参数确定最优模型顺序nx作为一个范围1:10.
nx = 1:10;sys = ss (z1, nx);
自动生成的绘图显示了由此指定的订单的模型的Hankel奇异值nx.
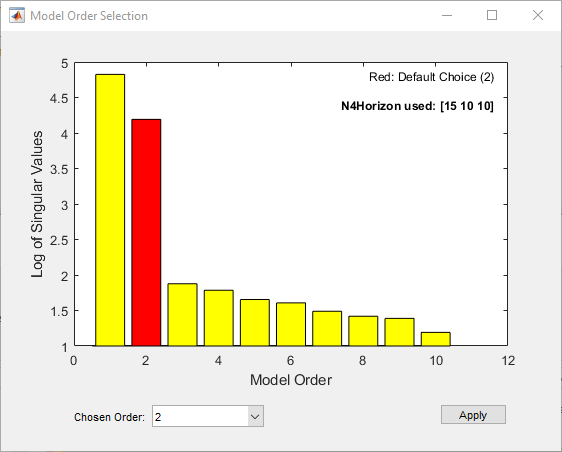
汉克尔奇异值相对较小的状态可以安全地丢弃。建议的默认顺序选择是2.
中选择模型顺序选择的顺序列表并点击申请.
识别具有输入延迟的状态空间模型
加载时域系统响应数据。
负载iddata7z7;
确定数据的四阶状态空间模型。指定一个已知的延迟2第一次输入的秒数0.第二次输入的秒数。
nx = 4;sys = ss (nx z7(施用),“InputDelay”, 2, 0);
修改形式、馈通和干扰模型矩阵
修正A、B、C矩阵的规范形式,在D矩阵中加入馈通项,在K矩阵中消除干扰模型估计。
负载输入输出数据并估计一个四阶系统使用党卫军默认选项。
负载iddata1z1sys1 = ss (z1, 4);
指定伴侣表单并比较一种带有默认值的矩阵一种矩阵。
sys2 = ss (z1 4“形式”那“同伴”);A1 = sys1。一种
A1 =4×4-0.5155 -3.8483 0.6657 -0.2666 5.8665 -2.7285 1.0649 -1.4694 -0.4487 0.9308 -0.6235 18.8148 -0.4192 0.5595 -16.0688 0.5399
A2 = sys2。一种
A2 =4×4103.× 00 0 -7.1122 0.0010 00 -0.9547 0 0.0010 0 -0.3263 00 0.0010 -0.0033
包括一个馈通项和比较D.矩阵。
sys3 = ss (z1 4“引线”,1);d1 = sys1.d.
d1 = 0.
D3 = sys3。D.
D3 = 0.0339
消除干扰建模和比较K.矩阵。
sys4 = ss (z1 4'diskancemodel'那“没有”);K1 = sys1。K.
K1 =4×10.0520 0.0973 0.0151 0.0270
K4 = sys4。K.
K4 =4×10 0 0 0
作为独立参数估计初始状态
指定党卫军估计初始状态作为独立估计参数。
党卫军可以使用几种方法之一来处理初始状态。默认情况下,党卫军根据估计数据自动选择方法。您可以通过使用修改选项集来自己选择方法ssestOptions.
加载输入-输出数据z1并估计二阶状态空间模型sys使用默认选项。使用返回初始状态的语法X0..
负载iddata1z1[sys, x0] = ss (z1, 2);X0.
x0 =2×10 0.
缺省情况下,使用'汽车'设置InitialState.找出哪种方法党卫军的价值InitialState在sys。Report。
sys.Report.InitialState
ans = ' 0 '
该软件应用了“零'方法,意味着软件将初始状态设置为零而不是估计它们。这个选择与0.返回值为X0..
指定党卫军估计初始状态代替作为独立的参数使用“估计”设置。使用ssestOptions创建修改的选项集,并指定该选项集来评估新模型。
选择= ssestOptions (“InitialState”那“估计”);[SYS1,X0] = SSEST(Z1,2,OPT);X0.
x0 =2×10.0068 - 0.0052
X0.现在有非零值的估计参数。
利用正则化估计状态空间模型
从窄带宽信号得到二阶系统的正则五阶状态空间模型。
负载估计数据。
负载regularizationExampleData埃迪塔;
创建用于生成估计数据的传递函数模型(真系统)。
trueSys = idtf([0.02008 0.04017 0.02008],[1 -1.561 0.6414],1);
估计一个缺陷的状态空间模型。
选择= ssestOptions ('SearchMethod'那“lm”);m = ssest(edata,5,'形式'那“模态”那'diskancemodel'那“没有”那“t”、eData.Ts选择);
估计正则状态空间模型。
opt.regularization.lambda = 10;MR = SSEST(埃迪塔,5,'形式'那“模态”那'diskancemodel'那“没有”那“t”、eData.Ts选择);
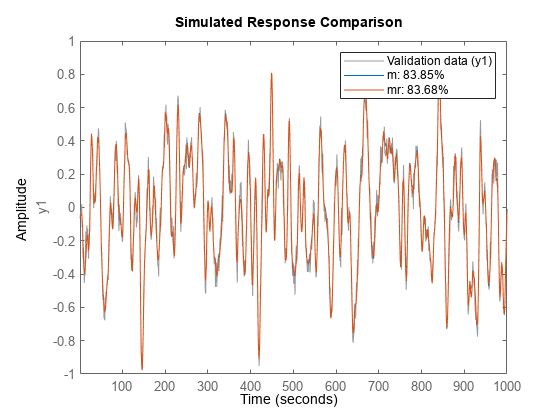
将模型输出与估计数据进行比较。
比较(eData, m先生);
比较模型的脉冲响应。
冲动(trueSys, m先生,50);传奇(“trueSys”那“米”那“先生”);

使用结构化估计估计部分已知的状态空间模型
估计一个测量输入-输出数据的状态空间模型。配置参数约束和初始值,以便使用状态空间模型进行估计。
创建一个IDS.模型指定初始参数进行估计。
A = blkdiag([-0.1 0.4;-0.4 - -0.1], [1 5;5 1]);B = [1;0 (3,1)];C = [1 1 1 1];D = 0;K = 0 (4,1);x = [0.1 0.1 0.1 0.1];t = 0; init_sys = idss(A,B,C,D,K,x0,Ts);
设置的所有条目K.来0.创造一个IDS.无状态扰动元的模型。
使用结构属性来修复某些模型参数的值。配置模型使其B.和K.是固定的,只有非零项一种是可评估的。
init_sys.Structure.A.Free=(一种~=0); init_sys.Structure.B.Free = false; init_sys.Structure.K.Free = false;
的条目init_sys.Structure.A.Free确定是否有相应的条目init_sys。一种是免费的(真正的)或固定(假).
加载测量数据,并使用指定的参数约束和初始值估计状态空间模型init_sys.
负载iddata2z2;sys = ss (z2, init_sys);
的估计参数sys满足指定的约束init_sys.
输入参数
输出参数
算法
党卫军使用非迭代子空间方法或迭代有理函数估计方法初始化参数估计。然后利用预测误差最小化方法对参数值进行优化。有关更多信息,请参见pem和ssestOptions.
参考文献
[1] Ljung, L。系统识别:用户的理论,第二版。上鞍河,NJ: Prentice Hall PTR, 1999。
扩展功能
也可以看看
职能
实时编辑任务
你也可以从以下列表中选择一个网站: