LPC.GydF4y2Ba
线性预测滤波系数GydF4y2Ba
句法GydF4y2Ba
描述GydF4y2Ba
[GydF4y2Ba找到一个系数GydF4y2Ba一种GydF4y2Ba那GydF4y2BaGGydF4y2Ba] = LPC(GydF4y2BaXGydF4y2Ba那GydF4y2BaP.GydF4y2Ba)GydF4y2BaP.GydF4y2BaThound Linear Predictor,一种冷冻滤波器,用于预测真值时间序列的当前值GydF4y2BaXGydF4y2Ba基于过去的样本。该函数还返回GydF4y2BaGGydF4y2Ba,预测误差的方差。如果GydF4y2BaXGydF4y2Ba是矩阵,该函数将每个列视为独立信道。GydF4y2Ba
例子GydF4y2Ba
用正向预测器估计序列GydF4y2Ba
使用三阶前进预测器估算数据序列。将估计与原始信号进行比较。GydF4y2Ba
首先,创建信号数据作为由归一化白色高斯噪声驱动的自回归(AR)过程的输出。使用AR过程输出的最后4096个样本以避免启动瞬态。GydF4y2Ba
噪声= Randn(50000,1);x =滤波器(1,[1/2 1/3 1/4],噪声);x = x(结束-4096 + 1:结束);GydF4y2Ba
计算预测器系数和估计信号。GydF4y2Ba
a = lpc(x,3);est_x =滤波器([0 -a(2:end)],1,x);GydF4y2Ba
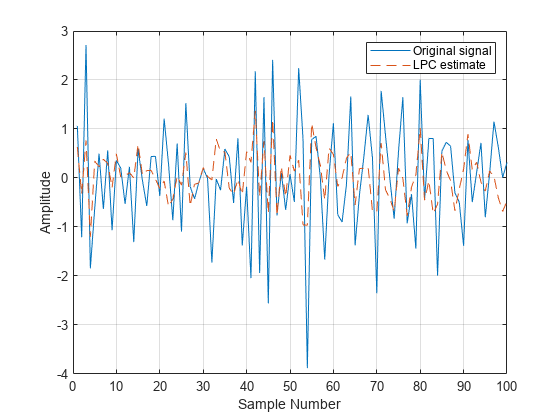
将预测信号与原始信号进行比较,绘制每个信号的最后100个样本。GydF4y2Ba
绘图(1:100,x(eNE-100 + 1:结束),1:100,EST_X(最终-100 + 1:结束),GydF4y2Ba' - 'GydF4y2Ba)网格Xlabel(GydF4y2Ba'样品号码'GydF4y2Ba) ylabel (GydF4y2Ba'振幅'GydF4y2Ba) 传奇(GydF4y2Ba'原始信号'GydF4y2Ba那GydF4y2Ba'LPC估计'GydF4y2Ba)GydF4y2Ba
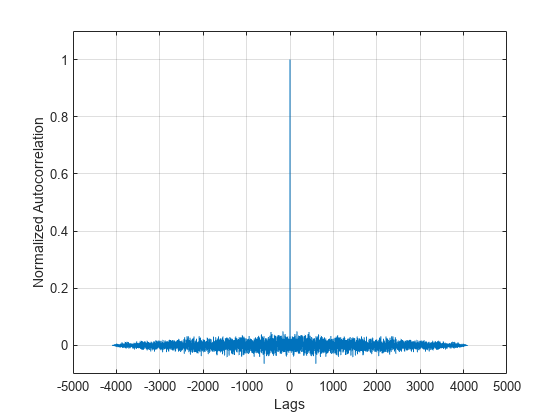
计算预测误差和预测误差的自相关序列。绘制自相关。预测误差近似为三阶AR输入过程的高斯白噪声。GydF4y2Ba
e = x-est_x;[ACS,LAG] = Xcorr(e,GydF4y2Ba'coeff'GydF4y2Ba);绘图(滞后,ACS)网格XLABEL(GydF4y2Ba“滞后”GydF4y2Ba) ylabel (GydF4y2Ba'标准化自相关'GydF4y2Ba)ylim([ - 0.1 1.1])GydF4y2Ba
输入参数GydF4y2Ba
输出参数GydF4y2Ba
更多关于GydF4y2Ba
预测误差GydF4y2Ba
预测错误,GydF4y2BaE.GydF4y2Ba(GydF4y2BaNGydF4y2Ba),可以被视为预测错误滤波器的输出GydF4y2Ba一种GydF4y2Ba(GydF4y2BaZ.GydF4y2Ba), 在哪里GydF4y2Ba
HGydF4y2Ba(GydF4y2BaZ.GydF4y2Ba)是最佳的线性预测器。GydF4y2Ba
XGydF4y2Ba(GydF4y2BaNGydF4y2Ba)是输入信号。GydF4y2Ba
是预测的信号。GydF4y2Ba
算法GydF4y2Ba
LPC.GydF4y2Ba通过最小化最小二乘意义的预测误差来确定前向线性预测器的系数。它具有在过滤器设计和语音编码中的应用。GydF4y2Ba
LPC.GydF4y2Ba使用自动增加(AR)建模的自相关方法来找到滤波器系数。即使数据序列是正确顺序的AR进程,生成的过滤器也可能完全模拟此过程,因为自相关方法隐式窗口数据。换句话说,该方法假设信号样本超出长度GydF4y2BaXGydF4y2Ba是0。GydF4y2Ba
LPC.GydF4y2Ba计算最小二乘解GydF4y2BaXGydF4y2Ba一种GydF4y2Ba=GydF4y2BaB.GydF4y2Ba, 在哪里GydF4y2Ba
和GydF4y2BamGydF4y2Ba是的长度GydF4y2BaXGydF4y2Ba.使用正常方程来解决最小二乘问题GydF4y2Ba 引出了Yule-Walker方程GydF4y2Ba
在哪里GydF4y2BaR.GydF4y2Ba= [GydF4y2BaR.GydF4y2Ba(1)GydF4y2BaR.GydF4y2Ba(2)......GydF4y2BaR.GydF4y2Ba(GydF4y2BaP.GydF4y2Ba+ 1)GydF4y2Ba]GydF4y2Ba是一个自相关估计GydF4y2BaXGydF4y2Ba计算使用GydF4y2BaXCorr.GydF4y2Ba.Levinson-Durbin算法(见GydF4y2Ba莱文顿GydF4y2Ba)解决了Yule-Walker方程GydF4y2BaO.GydF4y2Ba(GydF4y2BaP.GydF4y2Ba2GydF4y2Ba)GydF4y2Ba失败了。GydF4y2Ba
参考文献GydF4y2Ba
L. B.杰克逊GydF4y2Ba数字滤波器和信号处理GydF4y2Ba.第2版。波士顿:Kluwer学术出版商,1989,第255-257页。GydF4y2Ba
也可以看看GydF4y2Ba
aryule.GydF4y2Ba|GydF4y2Ba莱文顿GydF4y2Ba|GydF4y2Ba掌上GydF4y2Ba|GydF4y2Ba豆浆GydF4y2Ba|GydF4y2BaSTMCB.GydF4y2Ba
选择一个网站GydF4y2Ba
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GydF4y2Ba.GydF4y2Ba
选择GydF4y2Ba网站GydF4y2Ba你也可以从以下列表中选择一个网站:GydF4y2Ba
美洲GydF4y2Ba
- 美国拉丁GydF4y2Ba(西班牙语)GydF4y2Ba
- 加拿大GydF4y2Ba(英语)GydF4y2Ba
- 美国GydF4y2Ba(英语)GydF4y2Ba
欧洲GydF4y2Ba
- 比利时GydF4y2Ba(英语)GydF4y2Ba
- 丹麦GydF4y2Ba(英语)GydF4y2Ba
- 德意志GydF4y2Ba(德语)GydF4y2Ba
- España.GydF4y2Ba(西班牙语)GydF4y2Ba
- 芬兰GydF4y2Ba(英语)GydF4y2Ba
- 法国GydF4y2Ba(Français)GydF4y2Ba
- 爱尔兰GydF4y2Ba(英语)GydF4y2Ba
- 意大利GydF4y2Ba(意大利语)GydF4y2Ba
- 卢森堡GydF4y2Ba(英语)GydF4y2Ba
- 荷兰GydF4y2Ba(英语)GydF4y2Ba
- 挪威GydF4y2Ba(英语)GydF4y2Ba
- Österreich.GydF4y2Ba(德语)GydF4y2Ba
- 葡萄牙GydF4y2Ba(英语)GydF4y2Ba
- 瑞典GydF4y2Ba(英语)GydF4y2Ba
- 瑞士GydF4y2Ba
- 英国GydF4y2Ba(英语)GydF4y2Ba
亚太地区GydF4y2Ba
- 澳大利亚GydF4y2Ba(英语)GydF4y2Ba
- 印度GydF4y2Ba(英语)GydF4y2Ba
- 新西兰GydF4y2Ba(英语)GydF4y2Ba
- 中国GydF4y2Ba
- 日本GydF4y2Ba(日本語)GydF4y2Ba
- 한국GydF4y2Ba(한국어)GydF4y2Ba
