主要内容
将信号与不同的开始时间对齐
许多测量涉及多个传感器异步收集的数据。如果你想整合这些信号,你必须同步它们。信号处理工具箱™有一些功能可以让您做到这一点。
例如,假设一辆汽车正在过桥。它产生的振动是由位于不同地点的三个相同的传感器测量的。信号有不同的到达时间。
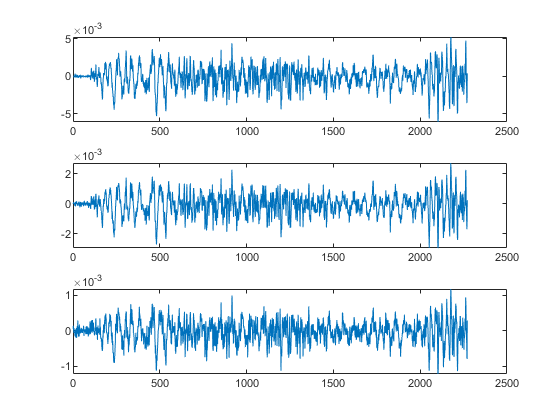
将信号加载到MATLAB®工作空间并绘制它们。
负载relatedsig斧子(1)=次要情节(3,1,1);情节(s1) ylabel (“s_1”) ax(2) = subplot(3,1,2);情节(s2) ylabel (“s_2”) ax(3) = subplot(3,1,3);情节(s3) ylabel (“s_3”)包含(“样本”) linkaxes (ax,“x”)

信号s1滞后s2反过来又引导s3.使用该方法可以精确地计算出延迟finddelay.你会看到s2领导s1到350年样本,s3滞后s1150个样本s2领导s3到500年样本。
T21 = finddelay(s2,s1) t31 = finddelay(s3,s1) t32 = finddelay(s2,s3)
T21 = 350 t31 = -150
保持先前的信号不动,剪掉其他矢量的延迟,将这些信号排成一行。在滞后差值上加1,以说明MATLAB®使用的基于1的索引。该方法以信号的最早到达时间为基准对信号进行比对s2.
轴(ax(1)情节(s1 (t21 + 1:结束)轴(ax(2))的阴谋(s2)轴(ax(3))情节(s3 (t32 + 1:结束)
使用alignsignals调整信号。该函数的工作原理是延迟较早的信号,因此使用的最新到达时间作为参考,即s3.
(x1, x2) = alignsignals (s1, s3);x2 = alignsignals (s2、s3);轴(ax(1)) plot(x1)轴(ax(2)) plot(x2)轴(ax(3)) plot(x3)

信号现在已经同步,可以进行进一步处理了。
另请参阅
相关的话题
你也可以从以下列表中选择一个网站:
