主要内容
在模拟快照时线性化气动系统
此示例显示如何在基于时间的工作点快照处线性化Simulink®模型。该示例使万博1manbetx用压缩空气填充气缸的动力学模型。
气动系统模型
打开Simulin万博1manbetxk模型。
mdl=“scdpneumaticlin”;开放式系统(mdl)

模拟模型。
[t,x,y]=sim(mdl);
在本例中,供应压力关闭,系统初始压力为0.2 MPa。供气压力为0.7 MPa。在仿真中,伺服阀打开到0.5e-4m。在模拟过程中,压力从0.2 MPa的初始压力升高,最终在供应压力下稳定下来。
绘图(t,y)

拍摄模拟快照
以10秒为间隔,在0到60秒的多个模拟时间内计算工作点芬多普函数模拟模型,在每个模拟时间获取模型条件的快照,并计算每个快照的操作点。
op=findop(mdl[01003005060]);
查看第二次快照的工作点。
执行部分(2)
ans=scdpneumaticlin模型的工作点。(在时间t=10.7245时评估的时变组件)状态:------------x(1)scdpneumaticlin/气缸压力模型/dPc//dt 3.1205e+05(2)scdpneumaticlin/管道模型/dPp//dt 3.1251e 05输入:无----------
线性化模型
要对模型进行线性化,首先指定线性化输入和输出点。对于本例,从伺服阀开度对模型进行线性化x输出压力。
io(1)=linio(“scdpneumaticlin/x”1.“输入”); io(2)=linio(“scdpneumaticlin/气缸压力模型”1.“输出”);
将所有计算快照的模型线性化。系统是一组状态空间模型。
sys=线性化(mdl、op、io);
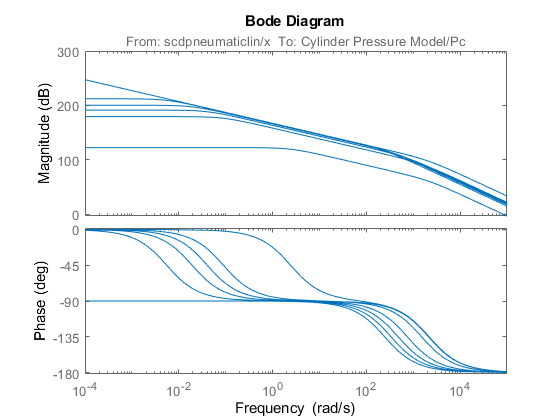
要查看线性化的可变性,请绘制所得线性系统的频率响应。
博德(系统)
关闭模型。
bdclose(mdl)
另见
相关话题
您还可以从以下列表中选择网站: