HL-20机身的修整和线性化
这是HL-20飞行器飞行控制系统设计和调整的五部分示例系列的第1部分。这一部分涉及机身的微调和线性化。
HL-20模型
HL-20型号是根据中所述型号改装而成NASA HL-20升降机身(航空航天区块集)。这是飞行器在飞行的最终下降和着陆阶段的6自由度模型。该阶段不使用推力,机身滑向着陆带。
开放式系统(“csthl20_修剪”)
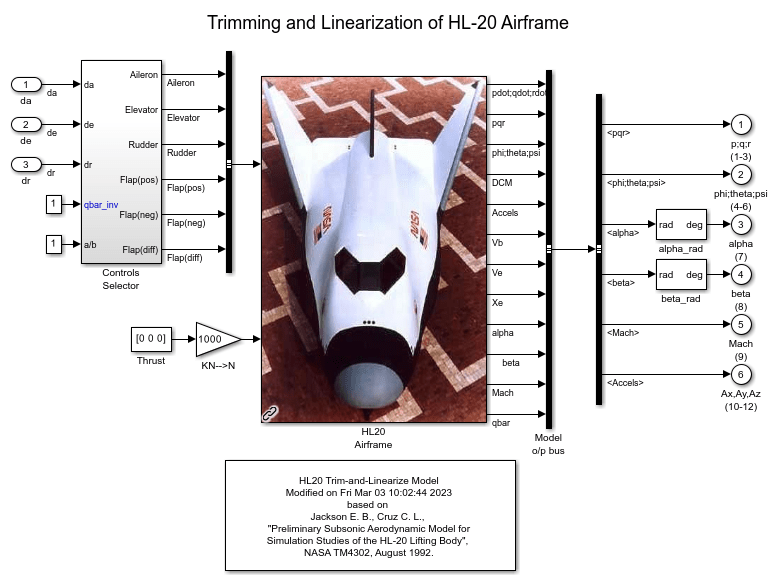
此版本的模型包括运动方程(EOM)、空气动力学表中的力和力矩计算、环境模型和“控制选择器”块,用于将副翼、升降舵和方向舵需求映射到六个控制面的偏转。
批量修整
调整包括计算副翼、升降舵和方向舵的偏转,使机身上的力和力矩归零,或等效地保持身体速度ub、vb、wb和角速度p、q、r稳定。因为在下降过程中没有使用推力,一个自由度就丧失了,所以必须放松配平条件,让ub变化。挠度da、de、dr的配平值取决于机身相对于风的方向。这个方向的特征是迎角(AoA) alpha和侧滑角(AoS) beta。

和operspec和芬多普功能,您可以有效地计算覆盖车辆工作范围的(alpha,beta)值网格上的配平偏转。在这里,我们将模型修剪为8个α值,范围为-10到25度,5个β值,范围为-10到+10度。标称高度和速度设置为10000英尺和0.6马赫。
d2r=pi/180;%度到弧度m2ft=3.28084;%米到英尺海拔=10000/m2英尺;%标称高度马赫数=0.6;%标称马赫数阿尔法向量=-10:5:25;%阿尔法射程贝塔向量=-10:5:10;%贝塔范围[alpha,beta]=ndgrid(alpha_-vec,beta_-vec);%(α,β)网格
使用operspec创建操作点规范数组。
opspec=operspec(“csthl20_修剪”,大小(α);操作规范(1)
csthl20_型阀内件的工作点规格。(在时间t=0时评估的时变组件)状态:-------------(1)csthl20_修剪/HL20机身/6DOF(欧拉角)/计算DCM和欧拉角/φθpsi规范:dx=0,初始猜测:0规范:dx=0,初始猜测:-0.199规范:dx=0,初始猜测:0(2)csthl20_修剪/HL20机身/6DOF(欧拉角)/p,q,r规范:dx=0,初始猜测:0规格:dx=0,初始猜测:0规格:dx=0,初始猜测:0(3)csthl20_修剪/HL20机身/6DOF(欧拉角)/ub,vb,wb规格:dx=0,初始猜测:203规格:dx=0,初始猜测:0规格:dx=0,初始猜测:23.3(4)csthl20_修剪/HL20机身/6DOF(欧拉角)/xe,ye,ze规格:dx=0,初始猜测:-1.21e+04规格:dx=0,初始猜测:0规格:dx=0,初始猜测:-3.05e+03输入:-------------(1)csthl20_微调/da初始猜测:0(2)csthl20_微调/de初始猜测:0(3)csthl20_微调/dr初始猜测:0输出:-------------(1)csthl20_微调/p;Qr(1-3)规格:无规格:无规格:无(2)csthl20_修剪/phi;θ;psi(4-6)规格:无规格:无规格:无(3)csthl20_微调/α(7)规格:无(4)csthl20_微调/β(8)规格:无(5)csthl20_微调/马赫(9)规格:无(6)csthl20_微调/斧头,Ay,Az(10-12)规格:无规格:无规格:无规格:无
为机身的每个方向指定平衡条件。为此:
通过将输出alpha和beta固定到所需值来指定方向。
通过将马赫数输出固定为0.6来指定机身速度。
将角速率p、q、r标记为稳定。
将速度vb和wb标记为稳定。
对于ct=1:40%指定alpha角度opspec(ct)。输出(3)。y=α(ct);opspec(ct)。输出(3)。已知=真;%指定β角opspec(ct)。输出(4)。y=β(ct);opspec(ct).输出(4).已知=真;%指定马赫速度opspec(ct)。输出(5)。y=马赫;opspec(ct)。输出(5)。已知=真;%将p、q、r标记为稳定opspec(ct).状态(2).稳定状态=真(3,1);% Mark vb,wb稳定opspec(ct).States(3).SteadyState=[假;真;真];%(φ,θ,psi)和(Xe,Ye,Ze)不稳定opspec(ct).状态(1).稳定状态=假(3,1);opspec(ct).状态(4).稳定状态=假(3,1);终止
为了充分描述配平条件,还需要
设置p=0以防止滚动。
将横摇/俯仰/偏航角度(φ、θ、psi)设置为(0、α、β),以对齐风和地球框架。
将机身位置(Xe、Ye、Ze)指定为(0,0,-高度)。
对于ct=1:40%将(φ,θ,psi)设置为(0,α,β)opspec(ct).States(1).x=[0;α(ct)*d2r;β(ct)*d2r];opspec(ct).状态(1).已知=真(3,1);%设置p=0(无滚动)操作规范(ct).状态(2).x(1)=0;opspec(ct).状态(2).已知(1)=真;%将(Xe,Ye,Ze)设置为(0,0,-高度)操作规范(ct).States(4).x=[0;0;-高度];opspec(ct).状态(4).已知=真(3,1);终止
现在使用芬多普一次性计算所有40个(α,β)组合的修剪条件。此批处理模式方法涉及模型的单个编译。FINDOP使用优化来解决表征每个平衡的非线性方程。此处我们使用“SQP”算法完成此任务。
%设置FINDOP解算器的选项TrimOptions=findopOptions;TrimOptions.OptimizationOptions.Algorithm=“sqp”; TrimOptions.DisplayReport=“关”;%修剪模型[ops,rps]=findop(“csthl20_修剪”、opspec、TRIMPOPTIONS);
这将返回8×5阵列OPS(操作条件)和RPS(优化报告)。可以使用RPS验证是否已成功计算每个修剪条件。第一对(α,β)的结果如下所示。
[α(1)β(1)]
ans=-10-10
行动(1)
csthl20_trim模型的工作点。(时变组件评估在时间t = 0) : ---------- ( 1) csthl20_trim / HL20机身/ 6自由度(欧拉角)/计算DCM和欧拉角/θψφx: 0 x: -0.175 x: -0.175 (2) csthl20_trim / HL20机身/ 6自由度(欧拉角)/ p, q, r x: 0 x: -0.158 x: 0.008 (3) csthl20_trim / HL20机身/ 6自由度(欧拉角)/乌兰巴托,vb,世行x: 191 x: -34.2 x:-33.7 (4.) csthl20_trim/HL20 Airframe/6DOF (Euler angle)/xe,ye,ze x: 0 x: 0 x: -3.05e+03输入:---------- (1.)csthl20_trim/da u: -24 (2.) csthl20_trim/de u: -6.49 (3.) csthl20_trim/dr u: 4.09
rps(1).终止字符串
ans='已成功满足操作点规范。'
批量线性化
飞行控制系统的增益通常作为α和β的函数进行安排,见第2部分(HL-20自动驾驶仪的角速度控制(控制系统工具箱)了解更多详细信息。为了调整这些增益,你需要HL-20机身在40配平条件下的线性化模型。使用线性化根据配平工况计算这些模型老年退休金.
%在每个配平条件下线性化机身动力学G=线性化(“csthl20_修剪”,“csthl20_配平/HL20机身”尺寸(克)
8x5状态空间模型阵列。每个模型有34个输出、9个输入和12个状态。
“控制选择器”块的线性等效值取决于升降舵偏转量,应针对qbar_inv=1(马赫数=0.6时的标称动态压力)进行计算。为方便起见,还应在40配平条件下对该块进行线性化。
CS=线性化(“csthl20_修剪”,“csthl20_微调/控制选择器”,ops);%调零a/b和qbar_库存通道CS=[CS(:,1:3)零(6,2)];
线性模型简化
线性化机身模型有12种状态:
xG=G.StateName
xG=12x1单元阵列{'phi theta psi(1)}{'phi theta psi(2)}{'phi theta psi(3)}{'p,q,r(1)}{'p,q,r(2)}{'p,q,r(3)}{'ub,vb,wb(1)}{'ub vb wb(2)}{'ub vb,vb,wb(3)}{'
一些状态不在横滚/俯仰/偏航自动驾驶仪的权限范围内,而其他状态对自动驾驶仪的设计贡献甚微。出于控制目的,最重要的状态是横滚角φ、身体速度ub、vb、wb和角速率p、q、r。相应地,使用莫德雷德获得仅保留这些状态的7阶模型。
G7=G;xKeep={...'φθpsi(1)'‘ub、vb、wb(1)’‘ub、vb、wb(2)’‘ub、vb、wb(3)’‘p,q,r(1)’‘p,q,r(2)’‘p,q,r(3)’}59449;对于ct=1:40 G7(:,:,ct)=modred(G(:,:,ct),xElim,“截断”);终止
有了这些线性化模型,您可以开始调整和调度飞行控制系统增益的任务。请参阅HL-20自动驾驶仪的角速度控制(控制系统工具箱)用于本示例的第2部分。
相关的话题
- HL-20自动驾驶仪的角速度控制(控制系统工具箱)
- Simulink中的模型增益调度控制系统万博1manbetx(控制系统工具箱)
您还可以从以下列表中选择网站: