增益调度
增益计划的控制器是一个控制器,其增益被自动调整为时间,操作条件或工厂参数。增益调度是控制动态变化随时间或操作条件的系统的共同策略。这种系统包括线性参数变化(LPV)系统和大类非线性系统。在Simulink中调整增益预定的控制器万博1manbetx®,您将可变增益表示为使用该变量的函数tunableSurface命令。有关用于调整增益预定控制器的工作流程的概述,请参阅增益安排基础知识。
功能
块
主题
增益预定控制系统
增益调度是一种使用一系列线性控制器控制非线性系统的方法,每个控制器都为系统的不同操作点提供令人满意的控制。
在Simulink中建立增益调度控制系统模型万博1manbetx
在Si万博1manbetxmulink中,模型增益计划使用查找表,插值块或MATLAB函数块。
调解增益时间表
了解使用的一般调整工作流程Systune.调整增益调度控制器。
为了调整增益预定的控制系统,您需要一系列描述所选设计点处的工厂动态的线性模型。
用于调整增益预定的控制系统,将一系列线性工厂模型与SLTUNER.接口到你的Simulink模型。万博1manbetx
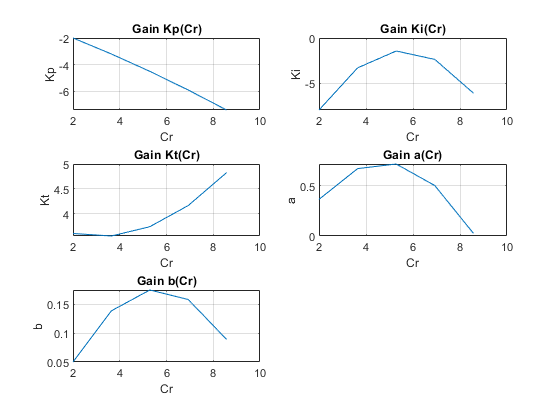
增益表面根据调度变量参数化可变增益。使用GAIN曲面在增益计划控制系统中模拟变量增益。
在调整增益计划的控制器时,您可以指定依赖于调度变量的调整目标。
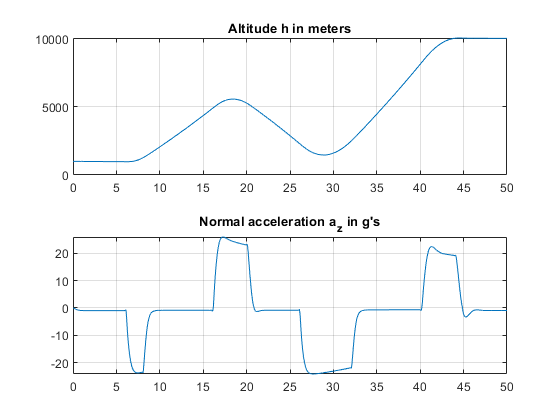
调整增益预定的控制器仅保证在每个设计点附近的合适性能。在全方位的操作条件下验证调整结果是很重要的。
HL-20自动驾驶仪案例研究
在设计点阵列中线性化空机模型,用于用于增益预定的控制设计。
为HL-20机身模型的内回路调整增益调度PI控制器。
HL-20 AutoPilot中的态度控制 - Siso设计
调整增益调度的SISO结构,以控制机身的滚转、俯仰和偏航。
调整用于控制机身的滚动,间距和偏航的增益预定的MIMO架构。
为Matlab中的HL-20机身设计一个增益预定的控制系统®。
特色例子
您也可以从以下列表中选择一个网站: