PID控制器(2自由度)
连续时间或离散时间两度自由度PID控制器
- 库:
万博1manbetx模拟/连续
描述
的PID控制器(2自由度)块实现了一个两自由度PID控制器(PID, PI,或PD)。这个块和2自由度离散PID控制器用时域参数设置为连续时间.
该模块根据参考信号和测量系统输出之间的差值生成输出信号。该模块根据设定点权重计算比例和微分动作的加权差值信号(b和c)。块输出是对各自差分信号的比例、积分和微分动作的和,其中每个动作根据增益参数加权P,我,D.一阶极点滤除导数作用。
块支持多种控制器类型万博1manbetx和结构。块中的可配置选项包括:
控制器类型(PID,PI或PD) - 查看控制器参数。
控制器形式(并联或理想)-请参阅形式参数。
时域(连续或离散)-请参阅时域参数。
初始条件和重置触发器-参见来源和外部复位参数。
输出饱和限制和内置防饱和机制-请参阅极限输出参数。
无颠簸控制传输和多回路控制的信号跟踪-参见启用跟踪模式参数。
在更改这些选项时,通过激活不同的变体子系统来更改块的内部结构。(看不同的子系统.)要检查块及其变体子系统的内部结构,右键单击块并选择面具>看下面具.
PID增益调优
PID控制器系数和设定值权值可手动或自动调整。自动调谐需要万博1manbetx®控制设计™软件。有关自动调谐的详细信息,请参阅选择优化方法参数。
港口
输入
裁判- 参考信号
标量|向量
如图所示,工厂的参考信号如图所示。

当参考信号是矢量时,块分别作用于每个信号,对PID系数进行矢量化,并产生相同尺寸的矢量输出信号。您可以将PID系数和一些其他参数指定为与输入信号尺寸相同的向量。这样做相当于为输入信号中的每个条目指定单独的PID控制器。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
港口1(y)-测量系统输出
标量|向量
反馈信号为控制器,从设备输出。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
P-比例增益
标量|向量
比例增益,从模块外部的源提供。外部增益输入非常有用,例如,当您希望将不同的PID参数化映射到块的PID增益时。您还可以使用外部增益输入来实现增益计划PID控制。在增益计划控制中,通过模型中的逻辑或其他计算确定PID系数,并将其输入到块中。
依赖性
要启用此端口,请设置控制器参数的来源到外部的.
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
我——积分获得
标量|向量
积分增益,从块外部的源提供。外部增益输入非常有用,例如,当您希望将不同的PID参数化映射到块的PID增益时。您还可以使用外部增益输入来实现增益计划PID控制。在增益计划控制中,通过模型中的逻辑或其他计算确定PID系数,并将其输入到块中。
当从外部提供增益时,积分增益的时间变化也被积分。这个结果的产生是由于在块内实现PID增益的方式。具体操作请参见控制器参数的来源参数。
依赖性
要启用此端口,请设置控制器参数的来源到外部的,并设置控制器到具有集成操作的控制器类型。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
D-导数增益
标量|向量
由块外部的源提供的微分增益。外部增益输入是有用的,例如,当您想要将不同的PID参数化映射到块的PID增益时。也可以使用外部增益输入来实现增益调度PID控制。在增益调度控制中,您通过逻辑或模型中的其他计算确定PID系数,并将它们提供给块。
当你从外部提供增益时,微分增益的时间变化也被微分。这个结果的产生是由于在块内实现PID增益的方式。具体操作请参见控制器参数的来源参数。
依赖性
要启用此端口,请设置控制器参数的来源到外部的,并设置控制器指向具有派生操作的控制器类型。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
N-过滤系数
标量|向量
导数滤波系数,由块外部的源提供。外部系数输入是有用的,例如,当您想要将不同的PID参数化映射到块的PID增益。还可以使用外部输入来实现增益调度PID控制。在增益调度控制中,您通过逻辑或模型中的其他计算确定PID系数,并将它们提供给块。
依赖性
要启用此端口,请设置控制器参数的来源到外部的,并设置控制器转换为具有经过筛选的导数的控制器类型。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
b-比例设定值权重
标量|向量
比例设定值重量,由块外部的源提供。例如,当您想要将不同的PID参数化映射到块的PID增益时,外部输入是有用的。还可以使用外部输入来实现增益调度PID控制。在增益调度控制中,您通过逻辑或模型中的其他计算确定PID系数,并将它们提供给块。
依赖性
要启用此端口,请设置控制器参数的来源到外部的.
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
c-导数设定值权重
标量|向量
从区块外部的源提供的导数设定值权重。例如,当您想要将不同的PID参数化映射到块的PID增益时,外部输入是有用的。还可以使用外部输入来实现增益调度PID控制。在增益调度控制中,您通过逻辑或模型中的其他计算确定PID系数,并将它们提供给块。
依赖性
要启用此端口,请设置控制器参数的来源到外部的,并设置控制器指向具有派生操作的控制器类型。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
重置-外部复位触发器
标量子
触发将积分器和滤波器复位到它们的初始条件。使用外部复位参数指定触发复位的信号类型。端口图标表示该参数中指定的触发器类型。例如,下面的插图显示了一个连续时间PID控制器(2DOF)块外部复位着手上升.

当触发发生时,该块将积分器和滤波器重置为积分器初始条件和滤波器初始条件参数或我0和D0港口。
请注意
符合电机行业软件可靠性协会(MISRA)的要求®)软件标准,您的模型必须使用布尔信号来驱动外部重置端口PID控制器块。
依赖性
要启用此端口,请设置外部复位除了没有一个.
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点|布尔
我0-积分初始条件
标量|向量
Integrator初始条件,从块外部的源提供。
依赖性
要启用此端口,请设置初始条件的来源到外部的,并设置控制器到具有集成操作的控制器类型。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
D0-滤波初始条件
标量|向量
导数滤波器的初始条件,由块外部的源提供。
依赖性
要启用此端口,请设置初始条件的来源到外部的,并设置控制器指向具有派生操作的控制器类型。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
向上-输出饱和上限
标量|向量
块输出的上限,从块外部的源提供。如果比例、积分和微分作用的加权和超过此端口提供的值,则块输出保持该值。
依赖性
要启用此端口,请选择极限输出并设置输出饱和度来源到外部的.
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
罗-输出饱和下限
标量|向量
块输出的下限,从块外部的源提供。如果比例,积分和衍生动作的加权之和低于该端口提供的值,则块输出将保持在该值。
依赖性
要启用此端口,请选择极限输出并设置输出饱和度来源到外部的.
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
TR-跟踪信号
标量|向量
控制器输出的信号以跟踪。当信号跟踪处于活动状态时,跟踪信号和块输出之间的差馈回积分器输入。信号跟踪可用于在两个控制器之间切换的系统中实现无力控制传输。它还可以防止在多环控制系统中的块卷绕。有关更多信息,请参阅启用跟踪模式参数。
依赖性
要启用此端口,请选择启用跟踪模式参数。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64|定点
TDTI——Discrete-integrator时间
标量子
离散积分器时间,作为块的标量提供。您可以使用自己的离散积分器采样时间值,该值定义块在Simulink或外部硬件上运行的速率。离散积分器时间值应与外部中断的平均采样率相匹配n该块在有条件执行的子系统中使用。万博1manbetx
换句话说,您可以指定Ts对于下面的任何积分器方法,使其值与外部中断的平均采样率相匹配。在离散时间下,控制器传递函数的导数项为:
哪里α(z)取决于您用此参数指定的积分器方法。
-
向前欧拉 -
-
向后欧拉 -
-
梯形 -
有关离散时间积分的更多信息,请参阅离散时间积分器块参考页。有关条件执行子系统的更多信息,请参阅有条件执行的子系统概述.
依赖性
要启用此端口,请设置时间域到离散时间然后选择PID控制器在一个有条件执行的子系统中选择。
数据类型:单身的|双|INT8.|int16|int32|int64|uint8|uint16|uint32|uint64
输出
参数
控制器——控制器类型
PID(默认)|圆周率|PD
指定控制器中的比例项、积分项和导数项。
-
PID -
比例、积分和微分作用。
-
圆周率 -
仅比例和积分的动作。
-
PD -
只有比例和导数作用。
提示
当前设置的控制器输出显示在补偿公式段的块参数和掩码下。
编程使用
块参数:控制器 |
| 类型:字符串,字符向量 |
价值观:“PID”,“圆周率”,“PD” |
违约:“PID” |
形式——控制器结构
平行(默认)|理想的
指定控制器结构是并行的还是理想的。
-
平行 -
比例增益,积分增益和导数增益P,我,D,独立应用。例如,对于一个连续时间的二自由度PID控制器并联形式,控制器输出u是:
哪里r为参考信号,y是测量的设备输出信号,以及b和c是设定值权重。
对于并行形式的离散时间2-DOF控制器,控制器输出为:
在哪里积分器的方法和过滤法参数决定α(z),β(z),分别。
-
理想的 -
比例增益P执行所有行动的总和。例如,对于理想形式的连续时间二自由度PID控制器,控制器输出为:
对于理想形式的离散时间2自由度PID控制器,传递函数为:
在哪里积分器的方法和过滤法参数决定α(z),β(z),分别。
提示
控制器当前设置的输出显示在补偿公式段的块参数和掩码下。
编程使用
块参数:控制器 |
| 类型:字符串,字符向量 |
价值观:“平行”,“理想” |
违约:“平行” |
时域-指定连续时间或离散时间控制器
连续时间(默认)|离散时间
当您选择离散时间,建议为块指定显式采样时间。见样本时间(继承时为-1)参数。选择离散时间也使积分器的方法,过滤法参数。
当PID控制器块位于具有同步状态控制的模型中(请参见国家控制(HDL编码器)块),您不能选择连续时间.
请注意
的PID控制器(2自由度)和2自由度离散PID控制器除此参数的默认值外,块是相同的。
编程使用
块参数:时光 |
| 类型:字符串,字符向量 |
价值观:“连续时间”,“离散时间” |
违约:“连续时间” |
PID控制器在一个有条件执行的子系统中-启用离散积分器时间端口
从(默认)|在
对于离散时间PID控制器,使离散时间积分器端口使用自己的离散时间积分器采样时间值。为了确保正确的集成,使用TDTI为精确的离散时间集成提供一个标量值Δt。
依赖性
要启用此参数,请设置时间域到离散时间.
编程使用
块参数:UseExternalTs |
| 类型:字符串,字符向量 |
价值观:“上”,“关闭” |
违约:“关闭” |
样本时间(继承时为-1)-样本间离散间隔
–1(默认值)|正标量
通过输入正标量值(例如0.1)来指定示例时间。默认离散采样时间为-1表示该块从上游块继承了它的采样时间。但是,建议您显式地设置控制器样本时间,特别是如果您希望上游块的样本时间发生变化。控制器系数P、I、D和N的影响取决于采样时间。因此,对于给定的一组系数值,改变采样时间就会改变控制器的性能。
看到指定采样时间为更多的信息。
要实现连续时间控制器,请设置时域到连续时间.
提示
如果你想用一个外部指定的或可变的样本时间运行块,将这个参数设置为-1,并将块放入触发子系统.然后,在所需的采样时间触发子系统。
依赖性
要启用此参数,请设置时域到离散时间.
编程使用
块参数:取样时间 |
| 类型:标量子 |
价值观:-1,正标量 |
违约:-1 |
积分器的方法- 用于在离散时间控制器中计算积分的方法
向前欧拉(默认)|向后欧拉|梯形
在离散时间下,控制器传递函数的积分项为Ia(z),一个(z)取决于您用此参数指定的积分器方法。
-
向前欧拉 -
前向矩形(左)近似,
这种方法对于小采样次数是最好的,因为与控制器的带宽相比,Nyquist极限是大的。对于较大的采样时间,
向前欧拉这种方法可能会导致不稳定,即使在离散一个连续时间稳定的系统时也是如此。 -
向后欧拉 -
后向矩形(右)近似,
优势
向后欧拉方法是用这种方法离散稳定的连续时间系统总是得到一个稳定的离散时间结果。 -
梯形 -
双线性近似,
优势
梯形方法是用这种方法离散一个稳定的连续时间系统总是得到一个稳定的离散时间结果。在所有可用的集成方法中梯形方法使离散系统的频域特性与相应的连续时间系统的频域特性最接近。提示
当前设置的控制器公式显示在补偿公式段的块参数和掩码下。
有关离散时间积分的更多信息,请参阅离散时间积分器块参考页面。
依赖性
要启用此参数,请设置时间域到离散时间设定控制器到具有积分动作的控制器类型。
编程使用
块参数:IntegratorMethod |
| 类型:字符串,字符向量 |
价值观:“向前欧拉”,“向后欧拉”,“梯形” |
违约:“向前欧拉” |
过滤法-离散时间控制器导数的计算方法
向前欧拉(默认)|向后欧拉|梯形
在离散时间下,控制器传递函数的导数项为:
哪里α(z)取决于您使用此参数指定的过滤方法。
-
向前欧拉 -
前向矩形(左)近似,
这种方法对于小采样次数是最好的,因为与控制器的带宽相比,Nyquist极限是大的。对于较大的采样时间,
向前欧拉这种方法可能会导致不稳定,即使在离散一个连续时间稳定的系统时也是如此。 -
向后欧拉 -
后向矩形(右)近似,
优势
向后欧拉方法是用这种方法离散稳定的连续时间系统总是得到一个稳定的离散时间结果。 -
梯形 -
双线性近似,
优势
梯形方法是用这种方法离散一个稳定的连续时间系统总是得到一个稳定的离散时间结果。在所有可用的集成方法中梯形方法使离散系统的频域特性与相应的连续时间系统的频域特性最接近。提示
当前设置的控制器公式显示在补偿公式段的块参数和掩码下。
有关离散时间积分的更多信息,请参阅离散时间积分器块参考页面。
依赖性
要启用此参数,请设置时间域到离散时间并使使用过滤导数.
编程使用
块参数:FilterMethod |
| 类型:字符串,字符向量 |
价值观:“向前欧拉”,“向后欧拉”,“梯形” |
违约:“向前欧拉” |
主要
来源-控制器增益和滤波系数的来源
内部(默认)|外部
-
内部 -
使用块参数指定控制器增益、滤波系数和设定值权重P,我,D,N,b,c分别。
-
外部的 -
使用块输入从外部指定PID增益、滤波系数和设定值权重。对于当前控制器类型所需的每个参数,一个额外的输入端口出现在块上。
启用参数的外部输入允许您在块外部计算它们的值,并将它们作为信号输入提供给块。
例如,当您希望将不同的PID参数化映射到块的PID增益时,外部输入非常有用。您还可以使用外部增益输入来实现增益计划PID控制。在增益计划控制中,通过模型中的逻辑或其他计算确定PID增益,并将其提供给块。
当您向外部提供增益时,积分增益值和导数增益值的时间变化分别被积分和微分。导数设定值权重c也有区别。出现这种结果是因为在连续时间和离散时间内,增益在积分或微分之前应用于信号。例如,对于具有外部输入的连续时间PID控制器,积分器项的实现如下图所示。

在块内,输入信号u乘以外部提供的积分器增益,我之前,集成。这个实现的收益率:
因此,积分增益包含在积分中。类似地,在块的导数项中,微分之前乘以导数增益,从而产生导数增益D导数设定点权重c要区别对待。
编程使用
块参数:ControllerParametersSource. |
| 类型:字符串,字符向量 |
价值观:“内部”,“外部的” |
违约:“内部” |
比例(P)-比例增益
1(默认)|标量|向量
为比例增益指定一个有限的实际增益值。当控制器形式是:
平行- 比例动作与积分和衍生动作无关。例如,对于一个连续时间的二自由度PID控制器并联形式,控制器输出u是:哪里r为参考信号,y是测量的设备输出信号,以及b和c是设定值权重。
对于并行形式的离散时间2-DOF控制器,控制器输出为:
在哪里积分器的方法和过滤法参数决定α(z),β(z),分别。
理想的-比例增益乘以积分和微分项。例如,对于理想形式的连续时间二自由度PID控制器,控制器输出为:对于理想形式的离散时间2自由度PID控制器,传递函数为:
在哪里积分器的方法和过滤法参数决定α(z),β(z),分别。
可调:是的
依赖性
要启用该参数,请设置Controller参数来源到内部.
编程使用
块参数:P |
| 类型:标量,向量 |
| 违约:1 |
积分(I)——积分获得
1(默认)|标量|向量
为积分增益指定一个有限的实增益值。
可调:是的
依赖性
要启用此参数,请在主要页签,设置控制器参数来源到内部,并设置控制器到具有积分作用的类型。
编程使用
块参数:我 |
| 类型:标量,向量 |
| 违约:1 |
衍生物(D)-导数增益
0(默认)|标量|向量
为导数增益指定一个有限的实增益值。
可调:是的
依赖性
要启用此参数,请在主要页签,设置控制器参数来源到内部,并设置控制器到PID或PD.
编程使用
块参数:D |
| 类型:标量,向量 |
| 违约:0 |
使用过滤导数-对导数项应用过滤器
在(默认)|从
仅对于离散时间PID控制器,清除此选项以用未过滤的离散时间微分器替换过滤后的微分。当你这样做时,控制器输出的导数项变成:
对于连续时间PID控制器,始终过滤导数项。
依赖性
要启用此参数,请设置时域到离散时间,并设置控制器具有派生项的类型。
编程使用
块参数:UseFilter |
| 类型:字符串,字符向量 |
价值观:“上”,“关闭” |
违约:“上” |
滤波器系数(N)-导数滤波系数
100(默认)|标量|向量
为滤波器系数指定一个有限的实际增益值。滤波器系数确定滤波器在块的导数作用中的极点位置。滤波器极的位置取决于时域参数。
当时域是
连续时间,磁极位置为s = n.当时域是
离散时间,极点的位置取决于过滤法参数。过滤法 滤波极点位置 向前欧拉向后欧拉梯形
该块不支持万博1manbetxN =正(理想的未过滤导数)。当时域是离散时间,你可以清除使用过滤导数取下导数滤波器。
可调:是的
依赖性
要启用此参数,请在主要页签,设置控制器参数来源到内部设定控制器到PID或PD.
编程使用
块参数:N |
| 类型:标量,向量 |
| 违约:One hundred. |
选点重量(b)-比例设定值权重
1(默认)|标量|向量
控制器比例项上的设定值权重。二自由度控制器输出的比例项为P(br- - - - - -y),r是参考信号和y为测量的植物产量。设置b为0消除了对参考信号的比例作用,这可以减少系统响应中对设定值的阶跃变化的超调。改变的相对值b和c改变干扰抑制和设定点跟踪之间的平衡。
可调:是的
依赖性
要启用此参数,请在主要页签,设置控制器参数来源到内部.
编程使用
块参数:b |
| 类型:标量,向量 |
| 违约:1 |
设定值权重(c)-导数设定值权重
1(默认)|标量|向量
控制器导数项上的设定值权重。二自由度控制器的导数项作用于铬- - - - - -y,在那里r是参考信号和y为测量的植物产量。因此,设置c0消除了对参考信号的导数作用,这可以减少对设定点中阶跃变化的瞬态响应c为0的控制器既能有效地抑制扰动,又能平滑地跟踪设定值而不产生过多的瞬态响应。改变的相对值b和c改变干扰抑制和设定点跟踪之间的平衡。
可调:是的
依赖性
要启用此参数,请在主要页签,设置控制器参数来源到内部设定控制器对具有导数作用的类型。
编程使用
块参数:c |
| 类型:标量,向量 |
| 违约:1 |
选择优化方法-自动调整控制器系数的工具
基于传输功能(PID调谐器应用程序)(默认)|基于频率响应的
如果你有万博1manbetxSimulink控制设计软件,您可以在块内部自动调整PID系数。为此,请使用此参数选择调整工具,然后单击调优.
-
基于传输功能(PID调谐器应用程序) -
使用PID调谐器,它允许您在检查相关系统响应以验证性能的同时交互式地调整PID系数。PID调谐器可以调整所有系数P,我,D,N,和设定值系数b和c.默认情况下,PID调谐器使用植物模型的线性化。对于无法线性化的模型,您可以根据根据模拟或测量响应数据估计的电厂模型调整PID系数。有关详细信息,请参阅二自由度PID控制器的设计(万博1manbetxSimulink控制设计).
-
基于频率响应的 -
使用基于频率响应的PID调谐器,基于通过模拟获得的频率响应估计数据调整PID控制器系数。这种调谐方法对于不可连接的植物或线性化至零的植物特别有用。基于频率响应的PID调谐器曲调系数P,我,D,N,但不调整设定值系数b和c。有关详细信息,请参阅根据厂频响应数据设计PID控制器(万博1manbetxSimulink控制设计).
这两种调优方法都采用单回路控制配置。万博1manbetxSimulink控制设计软件包括其他适合更复杂配置的调优方法。有关其他调优方法的信息PID控制器块,看选择控制设计方法(万博1manbetxSimulink控制设计).
依赖性
要启用此参数,请在主要页签,设置控制器参数来源到内部.
启用过零检测-在复位和进入或离开饱和状态时检测过零
在(默认)|从
过零检测可以准确地定位信号的不连续性,而无需使用过小的时间步长,这会导致较长的模拟时间。如果您选择极限输出或激活外部复位在PID控制器块中,激活过零检测可以减少模拟中的计算时间。选择此参数将激活过零检测:
初始状态重置时
进入上饱和状态或下饱和状态时
离开较高或较低饱和状态时
有关过零检测的更多信息,请参见过零检测.
编程使用
块参数:零交叉 |
| 类型:字符串,字符向量 |
价值观:“上”,“关闭” |
违约:“上” |
初始化
来源-积分和导数初始条件的来源
内部(默认)|外部的
万博1manbetxSimulink使用初始条件在模拟开始时或在指定的触发事件时初始化积分器和导数滤波器(或未过滤的导数)输出。(见外部复位参数。)这些初始条件确定初始块输出。使用此参数选择如何将初始条件值提供给块。
-
内部 -
属性指定初始条件积分器初始条件和滤波器初始条件参数。如果使用过滤导数,则使用微分器参数指定未筛选微分器的初始条件,而不是筛选初始条件。
-
外部的 -
使用块输入从外部指定初始条件。额外的输入端口我o和Do出现在块上。如果使用过滤导数如果未选择,则在以下位置提供未过滤微分器的初始条件:Do而不是过滤器初始条件。
编程使用
块参数:InitialConditionSource |
| 类型:字符串,字符向量 |
价值观:“内部”,“外部的” |
违约:“内部” |
积分器-积分初始条件
0(默认)|标量|向量
万博1manbetxSimulink使用积分器初始条件在模拟开始时或在指定的触发事件(参见外部复位).积分器的初始条件和滤波器的初始条件决定了初始输出PID控制器块。
积分器初始条件不能为楠或Inf.
依赖性
要使用此参数,请在初始化选项卡,设置来源到内部,并设置控制器到具有积分作用的类型。
编程使用
块参数:初始条件积分器 |
| 类型:标量,向量 |
| 违约:0 |
过滤器-滤波初始条件
0(默认)|标量|向量
万博1manbetxSimulink使用过滤器初始条件在模拟开始时或在指定触发事件时初始化衍生过滤器(请参见外部复位).积分器的初始条件和滤波器的初始条件决定了初始输出PID控制器块。
筛选器初始条件不能为空楠或Inf.
依赖性
要使用此参数,请在初始化选项卡,设置来源到内部,并使用带有微分滤波器的控制器。
编程使用
块参数:InitialConditionForFilter |
| 类型:标量,向量 |
| 违约:0 |
微分器-未过滤导数的初始条件
0(默认)|标量|向量
使用未过滤的导数时,Simulink使用此参数在模拟开始时或在指定的触发事件时万博1manbetx初始化微分器(请参见外部复位).积分器的初始条件和导数的初始条件决定了初始输出PID控制器块。
导数初始条件不能为空楠或Inf.
依赖性
要使用该参数,请设置时域到离散时间、清晰的使用过滤导数复选框,并在初始化选项卡,设置来源到内部.
编程使用
块参数:微分器EVScaledInput |
| 类型:标量,向量 |
| 违约:0 |
初始条件设置-应用初始条件的位置
状态(最有效)(默认)|输出
使用此参数指定是否应用积分器初始条件和滤波器初始条件参数设置为相应的块状态或输出。您只能在命令行修改此参数,使用设置参数设定初始条件设置块的参数。
-
状态(最有效) -
在所有情况下使用此选项,除非块处于触发子系统或函数调用子系统中,并且启用了简化初始化模式。
-
输出 -
当块处于触发子系统或函数调用子系统中并且启用了简化初始化模式时,请使用此选项。
有关的更多信息初始条件设置参数,请参见离散时间积分器块。
只有通过编程使用才能访问此参数。
编程使用
块参数:初始条件设置 |
| 类型:字符串,字符向量 |
价值观:“国家”,“输出” |
违约:“国家” |
外部复位-触发积分和滤波值的重置
没有一个(默认)|上升|下降|要么|水平
指定触发条件,使块将积分器和滤波器重置为初始条件。(如果使用过滤导数如果未选择,触发器将积分器和微分器重置为初始条件。)选择除没有一个启用重置用于外部复位信号的块上的端口。
-
没有一个 -
在仿真开始时,积分器和滤波器(或微分器)输出被设置为初始条件,并且在仿真期间不复位。
-
上升 -
当复位信号具有上升沿时,复位输出。
-
下降 -
当复位信号有下降沿时,复位输出。
-
要么 -
当复位信号上升或下降时,复位输出。
-
水平 -
当重置信号出现以下任一情况时,重置输出:
当前时间步长是否为非零
从上一个时间步长的非零变为当前时间步长的零
当复位信号非零时,该选项保持初始条件的输出。
依赖性
要启用此参数,请设置控制器到具有导数或积分作用的类型。
编程使用
块参数:ExternalReset. |
| 类型:字符串,字符向量 |
价值观:“没有”,“上升”,“下降”,“要么”,“水平” |
违约:“没有” |
线性化时忽略重置-强制线性化忽略重置
从(默认)|在
选择以强制Simulink和万博1manbetx万博1manbetxSimulink控制设计中指定的任何重置机制外部复位参数。忽略重置状态允许您围绕一个工作点线性化模型,即使那个工作点导致块重置。
编程使用
块参数:IgnoreLimit |
| 类型:字符串,字符向量 |
价值观:“关闭”,“上” |
违约:“关闭” |
启用跟踪模式-启动信号追踪
从(默认)|在
信号跟踪让块输出跟随您在TR港口。当信号跟踪激活时,跟踪信号和块输出之间的差以增益反馈给积分器输入Kt,由跟踪获得(Kt)参数。信号跟踪在多回路控制结构中有多种应用,包括无颠簸控制传递和避免上卷。
无扰控制转移
使用信号跟踪在两个控制器之间切换的系统中实现无扰动控制传输。假设您希望在一个PID控制器和另一个控制器之间传输控制。为此,请将控制器输出连接到TR输入如下图所示。
![]()
有关更多信息,请参见两自由度PID控制器的无扰动控制传递.
多回路的控制
使用信号跟踪以防止块卷绕在多环控制方法中。有关使用1DOF PID控制器的此方法的示例,请参阅防止块卷绕在多环控制中.
依赖性
要启用此参数,请设置控制器到具有积分作用的类型。
编程使用
块参数:跟踪模式 |
| 类型:字符串,字符向量 |
价值观:“关闭”,“上” |
违约:“关闭” |
跟踪系数(Kt)-信号跟踪反馈回路增益
1(默认)|标量
当您选择启用跟踪模式,信号之间的差异TR块输出以增益反馈到积分器输入Kt.使用此参数指定反馈环路中的增益。
依赖性
要启用此参数,请选择启用跟踪模式.
编程使用
块参数:Kt |
| 类型:标量子 |
| 违约:1 |
输出饱和
限制输出-将块输出限制为指定的饱和值
从(默认)|在
激活此选项将限制块输出,因此您不需要单独的饱和块后的控制器。它还可以让你激活内置在方块中的反发条机制(见抗饱和法参数)。使用以下命令指定输出饱和限制:下限和上限参数。您还可以在外部指定饱和度限制作为块输入端口。
编程使用
块参数:LimitOutput |
| 类型:字符串,字符向量 |
价值观:“关闭”,“上” |
违约:“关闭” |
来源-输出饱和限值源
内部(默认)|外部
使用此参数指定如何提供块输出的饱和上限和下限。
-
内部 -
使用以下命令指定输出饱和限制:上限和下限参数。
-
外部的 -
使用块输入端口外部指定输出饱和限制。额外的输入端口向上和罗出现在街区上。您可以使用输入端口来实现由Simulink模型中的逻辑或其他计算确定的输出饱和上限和下限,并传递给块。万博1manbetx
编程使用
块参数:卫星资源 |
| 类型:字符串,字符向量 |
价值观:“内部”,“外部的” |
违约:“内部” |
上限—块输出饱和上限
Inf(默认)|标量
指定块输出的上限。块输出保持在饱和上限当比例、积分和导数作用的加权和超过这个值时。
依赖性
要启用此参数,请选择极限输出.
编程使用
块参数:饱和上限 |
| 类型:标量子 |
违约:Inf |
下限- 块输出的饱和极限
-Inf(默认)|标量
指定块输出的下限。块输出保持在饱和下限当比例、积分和微分作用的加权和低于该值时。
依赖性
要启用此参数,请选择极限输出.
编程使用
块参数:饱和下限 |
| 类型:标量子 |
违约:-Inf |
线性化时忽略饱和度-强制线性化以忽略输出限制
从(默认)|在
力模型和万博1manbetx万博1manbetxSimulink控制设计的线性化命令来忽略块输出限制上限和下限参数。忽略输出限制允许您围绕一个工作点线性化模型,即使那个工作点导致块超出输出限制。
依赖性
要启用该参数,请选择极限输出参数。
编程使用
块参数:线性化增益 |
| 类型:字符串,字符向量 |
价值观:“关闭”,“上” |
违约:“关闭” |
抗饱和法- 积分器防风方法
没有一个(默认)|反算|夹紧
当您选择极限输出并且控制器组件的加权和超过指定的输出限制,块输出以指定的限制保持。然而,积分器输出可以继续增长(积分器绕组),增加块输出与块组件的总和之间的差异。换句话说,即使输出出现在饱和限制界限时,块中的内部信号也可以是未绑定的。如果没有防止集成商卷绕的机制,可能是两个结果:
如果进入积分器的信号符号不变,则积分器继续积分直到溢出。溢出值是积分器输出的数据类型的最大值或最小值。
如果输入积分器的信号的符号在加权总和超过输出限制后发生变化,则需要很长时间才能展开积分器并在块饱和极限内返回加权总和。
在这两种情况下,控制器性能都会受到影响。为了在没有防饱和机制的情况下消除饱和效应,可能需要使控制器失谐(例如,通过降低控制器增益),从而导致控制器迟滞。要避免此问题,请使用此参数激活防缠绕机构。
-
没有一个 -
不要使用反发条装置。
-
反算 -
当块输出饱和时,将饱和和不饱和控制信号之间的差反馈给积分器,松开积分器。下图是一个连续时间控制器的反计算反馈电路。要查看控制器配置的实际反馈电路,右键单击块并选择面具>看下面具.

使用背部计算系数(KB)参数,指定防饱和反馈电路的增益。它通常是令人满意的设置
Kb=I,或用于具有衍生动作的控制器,Kb=sqrt(I*D).对于死区时间相对较大的电厂,反向计算可能有效[1]. -
夹紧 -
当分块组件的和超过输出限制且积分器输出和分块输入具有相同的符号时,积分停止。当分块组件的和超过输出限制且积分器输出和分块输入有相反的符号时,积分恢复。夹紧有时被称为条件集成。
钳制对于死区时间相对较短的植物是有用的,但如果死区时间较大,则会产生较差的瞬态响应[1].

依赖性
要启用该参数,请选择极限输出参数。
编程使用
块参数:抗缠绕模式 |
| 类型:字符串,字符向量 |
价值观:“没有”,“回算”,“夹紧” |
违约:“没有” |
背部计算系数(KB)-抗饱和反馈回路的增益系数
1(默认)|标量
的反算当块输出饱和时,反饱和方法使积分器展开。它通过向积分器反馈饱和和非饱和控制信号之间的差值来实现。使用背部计算系数(KB)参数指定抗饱和反馈电路的增益。有关更多信息,请参阅抗饱和法参数。
依赖性
要启用该参数,请选择极限输出参数,并设置抗饱和法参数到反算.
编程使用
块参数:Kb |
| 类型:标量子 |
| 违约:1 |
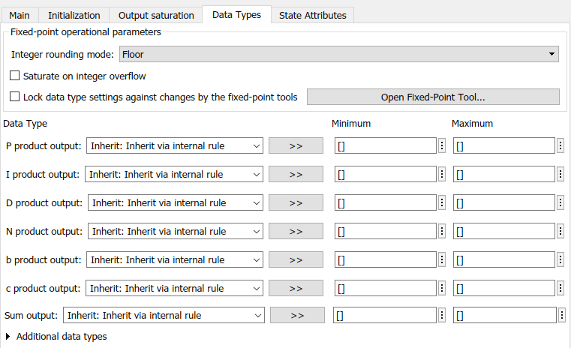
数据类型
此选项卡中的参数主要用于使用定点设计器™生成定点代码。它们定义在生成代码时如何存储和处理与块关联的数字量。
如果需要为固定点代码生成配置数据类型,请单击开放式定点刀具并使用该工具配置选项卡中的其余参数。有关使用定点工具的信息,请参见使用定点工具自动缩放数据对象(定点设计师).
使用定点工具后,如有必要,可以使用此选项卡中的参数调整定点数据类型设置。对于与块关联的每个数量,可以指定:
浮点或定点数据类型,包括该数据类型是否从块中的上游值继承。
数量的最小值和最大值,用于确定固定点表示的数量缩放方式。
要获得选择适当值的帮助,请单击![]() 打开相应数量的数据类型助手。有关更多信息,请参见使用数据类型助手指定数据类型.
打开相应数量的数据类型助手。有关更多信息,请参见使用数据类型助手指定数据类型.
数据类型选项卡中列出的具体数量取决于如何配置PID控制器块。一般情况下,可以为以下类型的数量配置数据类型:
产品输出-存储在块掩码下执行的乘法的结果。例如,产品产量存储增益块的输出,该增益块将块输入与比例增益相乘P.
Parameter—存储数字块参数的值,例如P,我, 或者D.
块输出-存储位于PID控制器块掩码下的块的输出。例如,使用积分器的输出来指定称为Integrator的块输出的数据类型。该块驻留在积分器子系统的掩码下,并计算控制器动作的积分器项。
累加器-存储与求和块关联的值。例如,SumI2蓄电池设置与sum块SumI2关联的累加器的数据类型。该块驻留在anti - wind子系统的Back Calculation子系统的掩码之下。
通常,通过在PID控制器块掩码下查找并检查其子系统,可以找到与任何列出的参数关联的块。还可以使用模型浏览器在掩码下搜索列出的参数名称,例如苏米2. (见模型资源管理器.)
匹配输入和内部数据类型
默认情况下,块中的所有数据类型都设置为继承:通过内部规则继承。通过此设置,Simulink选择数据类型万博1manbetx以平衡数值精度、性能和生成的代码大小,同时考虑嵌入式目标硬件的属性。
在某些情况下,块内的数据类型之间可能会发生不兼容。例如,在连续时间内,掩码下的积分器块只能接受类型为的信号双.如果块输入信号是不能转换为的类型双,如uint16,类型继承的内部规则在生成代码时生成错误。
为了避免此类错误,可以使用数据类型设置强制数据类型转换产品产量,我的产品输出,D产品输出到双,确保到达连续时间积分器的信号为双.
一般情况下,不建议在连续时间内使用代码生成应用程序的块。但是,如果您显式地将某些值设置为与块中的下游信号约束不兼容的数据类型,则离散时间中可能会发生类似的数据类型错误。在这种情况下,使用数据类型设置以确保所有数据类型在内部兼容。
定点操作参数整数舍入模式-定点操作的舍入模式
地板(默认)|天花板|会聚|最近的|轮|简单的|零
指定定点操作的舍入模式。有关详细信息,请参阅四舍五入(定点设计师).
块参数总是舍入到最接近的可表示值。要控制块参数的舍入,请使用MATLAB输入表达式®入掩码字段的舍入函数。
编程使用
块参数:RndMeth |
| 类型:特征向量 |
价值观:'天花板' | '收敛' | '地板' | '最近' | 'Round' | '最简单' | '零' |
违约:“地板” |
整数溢出饱和- 溢出动作的方法
从(默认)|在
指定溢出是否饱和或缠绕。
从-溢出包装到数据类型可以表示的适当值。例如,数字130不适合有符号8位整数,并换行为-126。
在-溢出饱和到数据类型可以表示的最小值或最大值。例如,与有符号8位整数关联的溢出可以饱和到-128或127。
提示
当您的模型可能存在溢出,并且希望在生成的代码中显示饱和保护时,请考虑选择此复选框。
当您希望优化生成代码的效率时,请考虑清除此复选框。
清除此复选框还可以帮助您避免过度指定块如何处理超出范围的信号。有关更多信息,请参见排除信号范围误差.
当您选中此复选框时,饱和度将应用于块上的每个内部操作,而不仅仅是输出或结果。
一般来说,代码生成过程可以在不可能溢出时进行检测。在这种情况下,代码生成器不会产生饱和代码。
编程使用
块参数:saterateonintegeroverflow. |
| 类型:特征向量 |
价值观:”从“|”“ |
违约:“关闭” |
根据定点工具的更改锁定数据类型设置—防止定点工具覆盖数据类型
从(默认)|在
状态属性
此选项卡中的参数主要用于代码生成。
州名(例如,'position')-连续时间过滤器和积分器状态的名称
''(默认)|字符向量
为连续时间PID控制器指定与积分器或滤波器相关联的状态的唯一名称。(有关离散时间PID控制器的状态名的信息,请参阅州名参数。)使用状态名称,例如:
为生成的代码中相应的变量
在模拟期间记录状态时作为存储名称的一部分
对于线性模型中相应的状态,通过对块进行线性化得到
有效的州名以字母或下划线字符开头,然后是字母数字或下划线字符。
依赖性
要启用此参数,请设置时域到连续时间.
编程使用
参数:积分器连续状态属性,FilterContinuousState属性 |
| 类型:特征向量 |
违约:'' |
州名-离散时间滤波器和积分器状态的名称
空字符串(默认)|字符串|特征向量
对于离散时间PID控制器,为与积分器或过滤器关联的状态指定唯一名称。(有关连续时间PID控制器中状态名称的信息,请参阅州名(例如,'position')参数。)
有效的州名以字母或下划线字符开头,然后是字母数字或下划线字符。使用状态名,例如:
为生成的代码中相应的变量
在模拟期间记录状态时作为存储名称的一部分
对于线性模型中相应的状态,通过对块进行线性化得到
有关在代码生成中使用状态名的详细信息,请参见模型接口元素的C代码生成配置(万博1manbetxSimulink编码器).
依赖性
要启用此参数,请设置时域到离散时间.
编程使用
参数:IntegratorStateIdentifier,FilterStateIdentifier |
| 类型:字符串,字符向量 |
违约:"" |
状态名必须解析为Simulink信号对象万博1manbetx-要求将该状态名称解析为信号对象
从(默认)|在
选择此参数要求离散时间积分器或滤波器状态名称解析为Simulink信号对象。万博1manbetx
依赖性
为离散时间积分器或滤波器状态启用此参数:
集时域到
离散时间.为积分器或过滤器指定一个值州名.
设置模型配置参数信号分辨率而不是
没有一个.
选中此复选框将禁用代码生成存储类对应的积分器或滤波器状态。
编程使用
块参数:IntegratorStateMustResolveToSignalObject,filterstatemustresolvetosignalobject. |
| 类型:字符串,字符向量 |
价值观:“关闭”,“上” |
违约:“关闭” |
代码生成存储类-用于代码生成的存储类
自动的(默认)|ExportedGlobal|ImportedExtern|ImportedExternPointer
选择状态存储类以生成代码。如果不需要与外部代码接口,请选择自动的.
有关更多信息,请参见模型接口元素的C代码生成配置(万博1manbetxSimulink编码器)和通过使用结构存储类将参数数据组织成结构(嵌入式编码器).
依赖性
为离散时间积分器或滤波器状态启用此参数:
集时域到
离散时间.为积分器或过滤器指定一个值州名.
设置模型配置参数信号分辨率而不是
没有一个.
编程使用
块参数:IntegratorRTWStateStorageClass,FilterRTWStateStorageClass |
| 类型:字符串,字符向量 |
价值观:“自动”,“ExportedGlobal”,“ImportedExtern”|“ImportedExternPointer” |
违约:“自动” |
代码生成存储类型限定符-存储类型限定符
空字符串(默认)|字符向量|“const”|“挥发性”|......
指定存储类型限定符,例如常量或挥发性.
请注意
此参数将在将来的版本中删除。若要将存储类型限定符应用于数据,请使用自定义存储类和内存节。除非使用嵌入式编码器的基于ERT的代码生成目标®,自定义存储类和内存部分不会影响生成的代码。
依赖性
要启用此参数,请设置代码生成存储类除了自动的.
编程使用
块参数:Integrator StateStorageTypeQualifier,FilterRTWStateStorageTypeQualifier |
| 类型:字符串,字符向量 |
价值观:"",“const”,“挥发性” |
违约:"" |
模型例子
块特征
数据类型 |
|
直接引线 |
|
多维信号 |
|
可变尺寸信号 |
|
过零检测 |
|
更多关于
二自由度PID控制器的分解
一个二自由度PID控制器可以解释为带有预滤波器的PID控制器,或带有前馈元素的PID控制器。
在并行形式下,一个两自由度PID控制器可等效地被如下框图所建模,其中C是一个单自由度PID控制器和F是参考信号上的预滤波器。

裁判为参考信号,y来自测量系统输出的反馈,和u为控制器输出。对于并联形式的连续二自由度PID控制器,其传递函数为F和C是
哪里b和c是设定值权重。
对于理想形式的2自由度PID控制器,传递函数为
类似的分解适用于离散时间二自由度控制器。
或者,并行两度自由度PID控制器可以由以下框图进行建模。

在这一认识中,,问对参考信号进行前馈调节。对于并联形式的连续二自由度PID控制器,其传递函数为问是
对于理想形式的二自由度PID控制器,传递函数为
的传递函数C与过滤器分解中的相同。
类似的分解适用于离散时间二自由度控制器。
兼容性考虑
工具书类
[1] Visioli,A.,“改进的PID控制器抗饱和方案,”控制理论与应用,第150卷第1期,2003年1月
扩展能力
另见
您还可以从以下列表中选择网站: