BLDC电机速度控制用串级PI控制器
此实施例说明几种方法来调谐PID控制器,用于在Simulink现有工厂之一。万博1manbetx在这里,你采用闭环PID自动调节器块调整2 PI控制器级联配置。的自动调节器块扰乱闭环实验和执行PID调节植物基于近期望带宽推定的植物频率响应。与此相反的开环PID自动调节器块,这里的反馈回路保持关闭和初始控制器增益在自调节过程没有改变。
BLDC电机型号
此示例中的模型使用3相BLDC电动机加上一个降压转换器和一个3相逆变器功率链路。降压转换器进行建模用MOSFET和IGBT的带,而不是理想的逆变器开关,以使器件导通电阻和特性被适当地表示。两个DC-DC转换器链路和逆变器的电压可以通过改变半导体栅极触发器,其控制所述电动机的速度进行控制。
mdl ='scdbldcspeedcontrol';open_system (mdl);
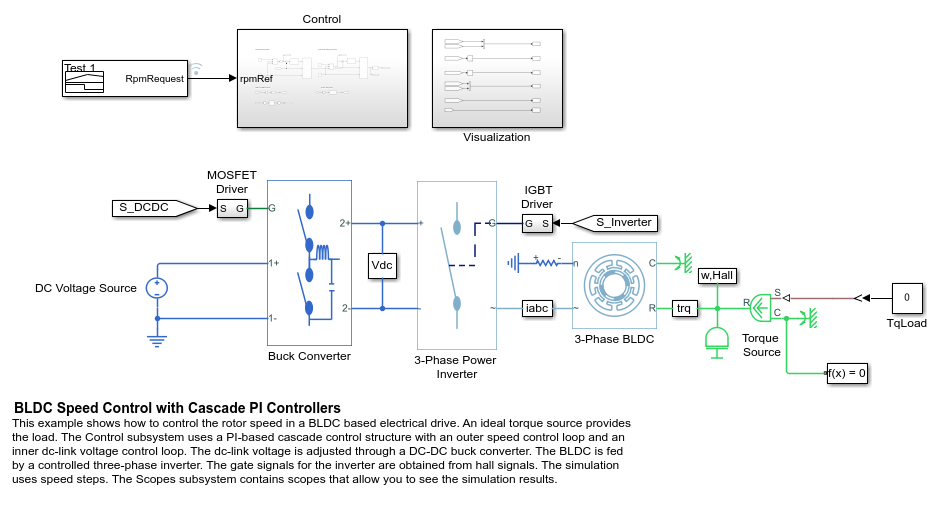
电机模型如下。
p = 4;极对数目RS = 0.1;定子每相电阻%[欧姆]Ls = 1的军医;%定子每相自感,Ls [H]MS = 1E-5;%定子的互感,MS [H]PSIM = 0.0175;%最大永磁体磁链[Wb]Jm = 0.0005;%转子惯量[公斤*平方公尺]TS = 5E-6;%基本样品时间[s]Tsc = 1的军医;%内控回路采样时间[s]VDC = 48;%最大直流链路电压[V]
该模型预先配置了两个级联PI控制器,一个用于内部直流链路电压回路,另一个用于外部电机速度回路,具有稳定的闭环运行。
KPW = 0.1;%比例增益速度控制器Kiw = 15;%积分增益为速度控制器KPV = 0.1;%比例增益为电压控制器KIV = 0.5;电压控制器的积分器增益%
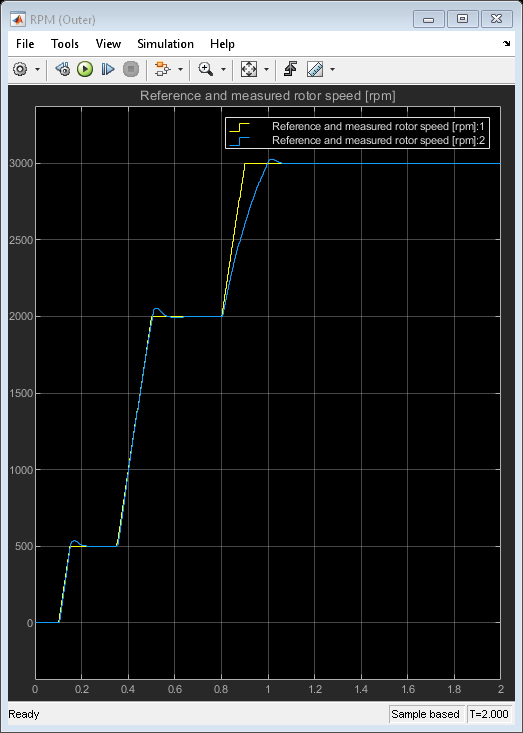
测试跟踪性能的信号是一系列从0-500 RPM、500-2000 RPM和2000-3000 RPM的速度斜坡。对具有初始控制器增益的模型进行仿真,跟踪响应较慢,表明需要对控制器进行重新校准。
open_system ([mdl'/可视/ RPM(外)']);sim (mdl);
配置闭环PID自动调节器模块
在本例中,您使用闭环PID自动调谐器块来改进控制器性能。这些块估计在实验过程中闭环的植物频率响应,然后调整控制器增益。检查控制子系统,查看自整定速度和自整定电压子系统中的闭环PID自整定块。
open_system ([mdl' /控制”]);
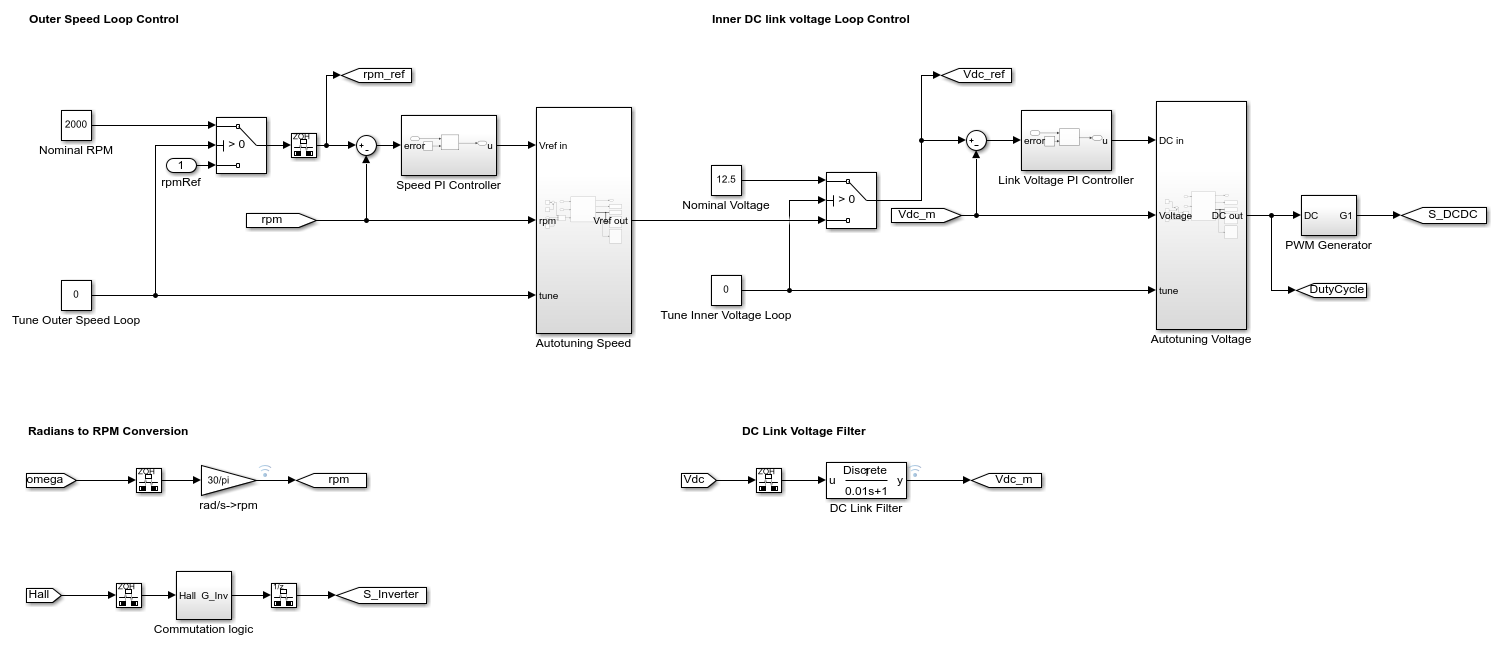
以下典型的级联环路调谐实践中,第一调与外速度回路打开的内电压回路。然后调用内部电压环路外速度环闭合。
要指定PID控制器的调优要求,请使用每个PID自动调优器块的“tuning”选项卡中的参数。在本例中,控制器是并行的、离散时间的PI控制器。控制器采样时间为100微秒。
一个目标相位裕量对于两个控制器60度给人的性能和耐用性之间的良好平衡。
对于外部速度环控制,选择a目标带宽100 rad /秒。对于内部电压回路控制,选择估计的目标带宽为400 rad/sec。这些值确保内环控制器具有比外环控制器更快的响应。
闭环PID自整定块进行闭环实验,得到系统的频率响应。您可以在块参数的“实验”选项卡中为这个实验指定参数。在这里,工厂签字是积极的,如在在工厂输出的正变化的标称工作点导致植物输入的正变化,当植物达到新的稳定状态。当所述植物是稳定如在此示例中,植物符号等效于它的DC增益的符号。
用于在自调节过程中喷射出的正弦波的振幅,使用1〜确保而植物饱和极限内剩余的该植物被适当地激发。如果选择了振幅过小,则自动调谐器块恐难从在功率电子电路的纹波区分响应信号。
调整内循环PI控制器
对于级联控制器的整定,首先建立内部电压回路的整定模型,然后是外部速度回路的整定模型。
要启用内部回路控制器的调优过程,在自动调优电压子系统中,将常量块调优内部回路设置为1,这基本上打破了外部回路,并使用标称(常量)电压参考值12.5作为替代。
set_param ([mdl'/控制/调整内部电压回路']“价值”,' 1 ');
还可以将常量块优化外部速度循环设置为0来禁用外部循环优化。
set_param ([mdl'/控制/调整外速度环']“价值”,' 0 ');
通过此设置,其被配置为从1至1.8秒模拟时间运行的闭环调谐实验闭环PID自动调节器块。植物使用第一第二达到稳态工作条件。一个好的估计闭环试验持续时间200 /目标带宽。您也可以使用转化%闭环PID自动调节器块的输出来监视该实验的进展,并阻止它在转化%信号稳定在100%附近。
运行模拟。当实验结束时,闭环PID自动调节器块返回用于内电压回路调谐PID控制器增益。模型将它们作为数组发送到MATLAB工作区VoltageLoopGains。
close_system([MDL'/可视/ RPM(外)']);open_system ([mdl' /可视化/直流(内部)]);sim (mdl);

更新与新的收益内环PI控制器。
千伏峰值= VoltageLoopGains (1);Kiv = VoltageLoopGains (2);
调谐外环PI控制器
接着,调外速度环。在自动调谐电压子系统,恒定块内调谐电压回路的值改变为0,禁止所述内电压环路调整。需要注意的是内环控制器已经使用了最新的调整收益。
set_param ([mdl'/控制/调整内部电压回路']“价值”,' 0 ');
类似地,在自动调整速度子系统中,将子系统自动调整速度中的常量调整外部速度循环更改为1,以启用外部速度循环调整。对于这个循环,使用0.9秒的闭环自动调优持续时间,从1秒开始。名义转速为2000转/分。
set_param ([mdl'/控制/调整外速度环']“价值”,' 1 ');
再次运行模拟。当实验结束时,闭环PID自动调谐器块返回调整后的PID控制器增益。模型将它们作为数组发送到MATLAB工作区SpeedLoopGains。
close_system([MDL' /可视化/直流(内部)]);open_system ([mdl'/可视/ RPM(外)']);sim (mdl);

用新的增益更新外环PI控制器。
Kpw = SpeedLoopGains (1);Kiw = SpeedLoopGains (2);
改进的跟踪性能自动调整之后
现在,您已经调整了两个控制器的PID增益,以便在无刷直流电机模型的速度控制中提供更好的性能。要检查调优后的控制器性能,请在两个循环中禁用调优。
set_param ([mdl'/控制/调整内部电压回路']“价值”,' 0 ');set_param ([mdl'/控制/调整外速度环']“价值”,' 0 ');
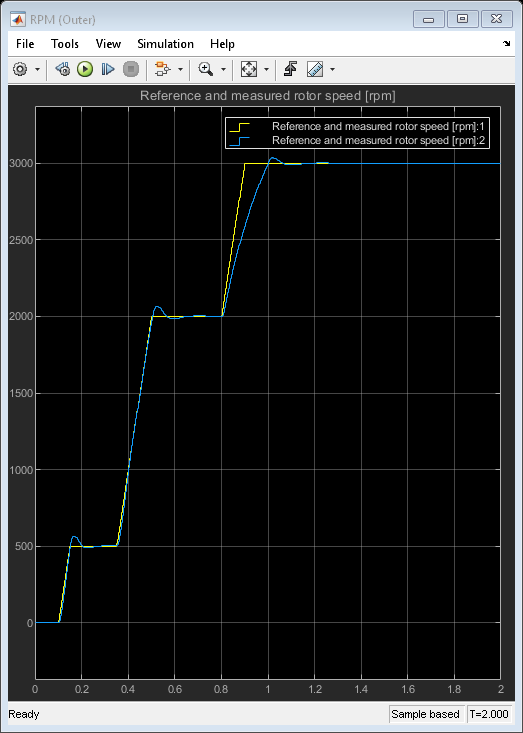
调谐收益导致测试斜坡信号的更好的跟踪。
sim (mdl);