闭环PID自动调节器
根据闭环实验估计的频率响应实时自动调整PID增益
- 图书馆:
万博1manbetx仿真软件控制设计
描述
该闭环PID自动调节器块允许您根据一个物理对象实时地调整PID控制器,对于该对象,您有一个初始的PID控制器,它会产生一个稳定的循环。在整个自整定过程中,系统始终处于初始PID控制器的闭环控制下。块可以调整PID控制器达到指定的带宽和相位裕度,而不需要参数化的工厂模型。如果您有诸如此类的代码生成产品万博1manbetx®编码器™,您可以生成代码实现对硬件的调整算法,让你收听实时使用或不使用Simulink的管理自调节过程。万博1manbetx
如果在Simulink中有一个建模的工厂和一个初始PID控制器万博1manbetx,则可以对建模工厂执行闭环PID自动调优。这样做可以让你预览植物的响应,并在实时调节控制器之前调整PID自动调节的设置。
要实现无模型调优,则闭环PID自动调节器块:
向装置内注入测试信号,收集装置的输入-输出数据,并实时估计频率响应。测试信号是在输入端加上正弦扰动信号的组合。
实验结束时,根据估计的目标带宽附近的工厂频率响应,对PID控制器参数进行整定。
更新一个PID控制器块或自定义PID控制器与调谐参数,允许你实时验证闭环性能。
不像的开环PID自动调节器块,循环遗体整个实验过程中关闭。保持闭合回路有助于估计实验过程中维持设备的安全运行。
你可以使用闭环PID自动调节器块来调整PID控制器:
任何稳定的工厂
有一个或多个集成(极任何连续时间在工厂小号= 0)或虚轴上的一对或多对复极
具有一个或多个积分器的离散时间装置(极点在ž= 1),或者在单位圆上复极点对|ž| = 1
如果没有初始PID控制器,可以使用开环PID自动调节器块以获得一个。然后,您可以切换到闭环PID自整定进行细化或重新调整。
块支持代码生成万博1manbetx万博1manbetx仿真软件编码器,嵌入式编码器®,万博1manbetxSimulink的PLC编码器™。它不支持使用HDL Co万博1manbetxder™生成代码。
有关使用闭环PID自动调节器块,请参阅:
有关PID自动调谐,更全面的信息的比较闭环和开环方法,请参阅何时使用PID自动调谐。
港口
输入
产量
U +量Δu-植物输入信号
标量
将数据块插入系统,使该端口将输入信号输入到您的设备。
当实验运行(
启动/停止正),则块内喷射在此端口测试信号进入植物。如果您有任何饱和或限速保护植物,饲料从信号U +量Δu进去。当实验没有运行(
启动/停止零或负的),块通过从不变信号ü来U +量Δu。
依赖关系
要启用此端口,请输入输出信号的配置中,选择控制+微扰。
数据类型:单|双
Δu- 植物输入摄
标量
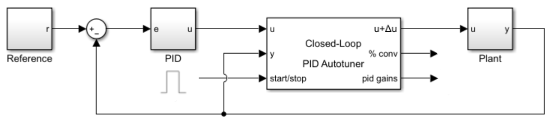
该块生成在此端口的扰动信号。通常,可以通过总和块注入从该端口扰动,如下面的图所示。

当实验运行(启动/停止,块在此端口产生扰动信号。
当实验没有运行(启动/停止零或负的),在这个端口的信号是零。在这种状态下,该块对设备没有影响。
依赖关系
要启用此端口,请输入输出信号的配置中,选择仅摄。
数据类型:单|双
% conv-实验过程中FRD估计的收敛性
标量
当实验运行(启动/停止为正),块体将测试信号注入装置,测量装置在时刻的响应ÿ。它使用这些信号来估计该植物的周围用于调谐的目标带宽数个频率的频率响应。% conv指示如何接近完成对工厂频率响应的估计。通常,这个值在实验开始后迅速上升到90%左右,然后逐渐收敛到一个更高的值。当水平接近100%时停止实验。
数据类型:单|双
pid增益- 调谐PID系数
公共汽车
此4-元件总线信号包含调谐PID增益P,一世,d和滤波器系数ñ。这些值对应于P,一世,d,ñ在给出的表达式参数形成参数。最初,值分别是0、0、0和100。当实验结束时,块更新值。这个总线信号总是有四个元素,即使您没有调优PIDF控制器。
如果您有一个与该块关联的PID控制器,您可以在实验结束后用这些值更新该控制器。为此,在Block选项卡中单击更新PID功能块。
数据类型:单|双
估计下午-使用调谐控制器估计相位裕度
标量
该端口输出由调谐控制器实现的估计的相位裕量,以度为单位。块更新此值调谐实验结束时。所估计的相位裕度从角度计算G(jωC)C(jωC),其中G是推测机械设备,C调优的控制器,和ωC为交叉频率(带宽)。方法指定的目标相位裕度可能不同目标相位裕度(度)参数。它是鲁棒性和稳定性通过调谐系统来实现的指标。
通常,估计的相位裕度接近目标相位裕度。通常,值越大,调优后的系统越健壮,超调越少。
负相位裕度表明闭环系统可能是不稳定的。
依赖关系
要启用此端口,请在Tuning选项卡中选择输出估计相位裕度由调谐控制器实现。
FRD- 估计频率响应
向量
该端口输出由实验估计的频率响应数据。最初,在值FRD为[0,0,0,0,0]。在实验过程中,该块在频率喷射信号[1/10 1/3,1,3,10]ωC,在那里ωC是目标带宽。在实验期间,每个样本的时间,该块更新FRD用含有在每个这些频率的复频率响应,分别的矢量。您可以使用响应的进程,以替代% conv检查估计的收敛。当实验站,该块更新FRD最后用估计的频率响应来计算PID增益。
依赖关系
要启用此端口,请在实验选项卡中选择带宽附近的植物频率响应。
名义上的-工厂输入和输出在公称工作点
向量
该端口输出一个包含植物输入的向量(U +量Δu)和电站输出(ÿ)当实验开始。这些值是植物的输入和输出处该块执行实验的标称工作点。
依赖关系
要启用此端口,请在实验选项卡中选择工厂名义投入和产出。
参数
优化选项卡
类型- PID控制器动作
π(默认)|PID|PIDF|……
指定系统中的PID控制器的类型。控制器类型指示什么行为是存在于控制器。下面控制器类型可用于PID自动调谐:
P——比例只一世——积分只π-比例积分PD- 比例和微分PDF-比例和导数与导数滤波器PID-比例积分和导数PIDF-比例,积分,导数与导数滤波器
当你更新一个PID控制器块或自定义PID控制器与调谐参数值,确保控制器类型匹配。
可调:是的
程序中使用
块参数:PIDType |
| 类型:特征向量 |
价值观:'P'|“我”|'PI'|“PD”|'PDF'|“PID”|'PIDF' |
默认:'PI' |
形成- PID控制器形式
平行(默认)|理想
指定控制器表单。控制器的形式决定了PID系数的解释P,一世,d,ñ。
平行——在平行式中,离散时间pid控制器的传递函数为:在哪里F一世(ž)和Fd(ž)是积分器和过滤器的公式(请参见
积分器的方法和筛选方法)。连续时间并联型PIDF控制器的传递函数为:其他控制器的操作量,以设定P,一世,或d零。
理想——在理想式中,离散时间pid控制器的传递函数为:连续时间理想形式PIDF控制器的传递函数为:
其他控制器的操作量,以设定d到零或设置,一世来
天道酬勤。(在理想状态下,控制器必须具有比例动作。)
当你更新一个PID控制器块或定制PID控制器调谐参数值,确保控制器形式匹配。
可调:是的
程序中使用
块参数:PIDForm |
| 类型:特征向量 |
价值观:“平行”|'理想' |
默认:“平行” |
时域- PID控制器的时域
离散时间(默认)|连续时间
指定PID控制器是一个离散时间或连续时间控制器。
对于离散时间,必须使用。指定PID控制器的采样时间控制器样品时间(秒)参数。
对于连续的时间,你还必须指定使用PID自动调谐实验采样时间实验样品时间(秒)参数。
程序中使用
块参数:TimeDomain |
| 类型:特征向量 |
价值观:“离散时间”|连续时间的 |
默认:“离散时间” |
控制器样品时间(秒)- PID控制器的采样时间
0.1(默认)|正的标量| -1
指定PID控制器的采样时间(以秒为单位)。这个值还设置了块执行的实验的采样时间。
执行PID调谐,块措施频率响应信息高达10倍的目标带宽的频率。为了确保这个频率小于奈奎斯特频率,目标带宽,ωC,必须满足ωCŤ小号≤0.3,在哪里Ť小号ωC你指定的控制器采样时间是控制器样品时间(秒)参数。
当你更新一个PID控制器块或自定义PID控制器与调谐参数值,确保控制器采样时间匹配。
提示
如果你想在你的应用程序运行具有不同的采样时间部署块,将该参数设置为-1,并把块一个触发子系统。然后,触发在所希望的采样时间的子系统。如果您不打算部署后更改采样时间,指定一个固定的和有限的采样时间。
依赖关系
要启用此参数,设置时域来离散时间。
程序中使用
块参数:DiscreteTs |
| 类型:标量 |
| 价值正的标量| -1 |
| 默认:0.1 |
实验样品时间(秒)-实验取样时间
0.02(默认)|为正的标量
即使当你调连续时间控制器,则必须为实验由块进行指定一个采样时间。一般情况下,连续时间不推荐对一个物理植物PID自动调谐控制器整定。如果您需要调整连续时间对工厂的Simulink模型,使用快速实验采样时间,如0.02 /万博1manbetxωC。
依赖关系
属性时启用此参数时域是连续时间。
程序中使用
块参数:ContinuousTs |
| 类型:正标量 |
| 默认:0.02 |
积分器的方法-积分器项的离散积分公式
向前欧拉(默认)|向后欧拉|梯形
指定控制器中积分器项的离散积分公式。在离散时间下,块所假设的PID控制器传递函数为:
平行形式,或者理想形式,
用于控制器的采样时间Ť小号中,积分器的方法参数决定公式F一世如下:
| 积分器的方法 | F一世 |
|---|---|
向前欧拉 |
|
向后欧拉 |
|
梯形 |
|
有关每种方法的相对优势的更多信息,请参见离散PID控制器块引用页面。
当你更新一个PID控制器块或定制PID控制器调谐参数值,确保积分方法匹配。
可调:是的
依赖关系
属性时启用此参数时域是离散时间并且,所述控制器包括积分动作。
程序中使用
块参数:IntegratorFormula |
| 类型:特征向量 |
价值观:“向前欧拉”|“落后欧拉|“梯形” |
默认:“向前欧拉” |
筛选方法-导数滤波项的离散积分公式
向前欧拉(默认)|向后欧拉|梯形
指定你的控制器中导数滤波器项的离散积分公式。在离散时间下,块所假设的PID控制器传递函数为:
平行形式,或者理想形式,
用于控制器的采样时间Ť小号中,筛选方法参数决定公式Fd如下:
| 筛选方法 | Fd |
|---|---|
向前欧拉 |
|
向后欧拉 |
|
梯形 |
|
有关每种方法的相对优势的更多信息,请参见离散PID控制器块引用页面。
当你更新一个PID控制器块或自定义PID控制器与调谐参数值,确保过滤器方法匹配。
可调:是的
依赖关系
属性时启用此参数时域是离散时间该控制器包括一个导数滤波器项。
程序中使用
块参数:FilterFormula |
| 类型:特征向量 |
价值观:“向前欧拉”|“落后欧拉|“梯形” |
默认:“向前欧拉” |
目标带宽(rad /秒)-调谐响应的目标交叉频率
1(默认)|为正标量
目标带宽是用于调谐开环响应的0 dB增益交叉频率的目标值CP,在那里P是植物的反应吗C是控制器响应。此交叉频率大致设置控制带宽。对于一个上升时间τ,很好的猜测用于目标带宽为2 /τ。
执行PID调谐,所述自动调谐器块措施的频率响应的信息高达10倍的目标带宽的频率。为了确保这个频率小于奈奎斯特频率,目标带宽,ωC,必须满足ωCŤ小号≤0.3,在哪里Ť小号你指定的控制器采样时间是控制器样品时间(秒)参数。由于这种情况,您可以执行调优的最快上升时间大约是1.67Ť小号。如果这个上升时间没有达到你的设计目标,考虑减少Ť小号。
为了获得闭环优化的最佳结果,使用初始PID控制器时,使用的目标带宽大约是带宽的10倍。要对控制器进行调优以获得更大的带宽更改,可以使用较小的更改进行增量调优。
要通过输入端口提供目标带宽,请选择使用外部源。
程序中使用
块参数:带宽 |
| 类型:正标量 |
默认:1 |
目标相位裕度(度)-目标开环响应的最小相位裕度
60(默认)范围为0-90的|标量
指定在交叉频率调谐开环响应一个目标最小相位裕度。目标相位裕量反映所期望的调谐系统的鲁棒性。典型地,选择在约45°的范围内的值-60℃。通常,较高的相位裕度改善过冲,但可以限制响应速度。默认值,60°,趋于平衡性能和稳健性,产生约5-10%的超调,这取决于你的植物的特性。
为了提供经由输入端口目标相位裕量,选择使用外部源。
可调:是的
程序中使用
块参数:TargetPM |
| 类型:标量 |
| 价值观:0-90 |
| 默认:60 |
实验选项卡
植物类型-植物的稳定性
稳定的(默认)|集成
指定设备是稳定的还是集成的。如果工厂有一个或多个积分器,请选择集成。
程序中使用
块参数:PlantType |
| 类型:特征向量 |
价值观:“稳定”|“整合” |
默认:“稳定” |
工厂注册-植物的标志
积极的(默认)|负
指定植物是阳性还是阴性。如果在标称操作点上的装置输入的正变化导致装置输出的正变化,则指定积极的。否则,指定负。对于稳定的植物,植物的迹象是植物直流增益的标志。
程序中使用
块参数:PlantSign |
| 类型:特征向量 |
价值观:'正'|“负面” |
默认:'正' |
正弦振幅-正弦扰动的振幅
1(默认值)|标量|向量of length 5
在实验过程中,块以一定的频率向植物注入正弦信号[1/10 1/3,1,3,10]ωC,在那里ωC是调优的目标带宽。使用正弦振幅来指定每个注入信号的振幅。指定一个:
在每个频率注入相同振幅的标量值
长度为5的向量,以指定每个的不同振幅[1/10 1/3,1,3,10]ωC
在具有典型目标带宽的典型工厂中,工厂在实验频率上的响应幅度变化不大。在这种情况下,可以使用标量值在所有频率上应用相同的大小扰动。但是,如果您知道响应在频率范围内急剧衰减,那么可以考虑降低低频输入的振幅,增加高频输入的振幅。当所有的植物响应都具有相当的量级时,估计实验在数值上是比较好的。
扰动振幅必须为:
足够大,使扰动克服了任何死区在工厂致动器和产生的响应高于噪音水平
足够小以保持植物的标称工作点附近的近似线性的区域内运行,并避免饱和植物的输入或输出
在实验中,正弦信号被叠加。因此,扰动至少可以和所有振幅的总和一样大。确保最大的可能的扰动是在你的工厂执行器的范围内。使执行器饱和会使估计的频率响应产生误差。
为了提供经由输入端口的正弦幅度,选择使用外部源。
可调:是的
程序中使用
块参数:AmpSine |
| 类型:标量,长度为5的向量 |
| 默认:1 |
块选项卡
减少内存,避免任务溢出(外部模式)仅部署调整算法 -
从(默认)|上
该块包含两个模块,一个执行实时频率响应估计,并且一个使用所得估计的响应来调整PID增益。当通过默认运行包含在外部模拟模万博1manbetx式中的块中的仿真模型,这两个模块都部署。您可以通过只部署估计模块保存在目标硬件内存(请参阅实时控制PID自动调谐在Simulink万博1manbetx)。在这种情况下,调整算法的Simulink的主机,而不是目标硬件上运行。万博1manbetx当选择此选项,大约有三分之一的内存部署算法使用的时候可以选择被清除。
另外,该PID增益计算要求比频率响应估计更加计算负荷。对于快速控制器的采样时间,一些硬件可能无法完成一个执行周期内的增益计算。因此,使用硬件具有有限计算能力的情况下,选择该选项,可以调谐PID控制器具有快速采样时间。
如果您打算部署的块,而无需使用外部模拟模式下执行PID自整定,不要选择此选项。
谨慎
使用此选项时,必须将模型配置为使数值块参数在生成的代码中是可调的,而不是内联的。要指定可调参数:
在模型编辑器:在配置参数,在代码生成>优化,组默认参数行为来
可调。在命令行:Use
set_param (mdl DefaultParameterBehavior,可调)。
程序中使用
块参数:DeployTuningModule |
| 类型:特征向量 |
价值观:“关闭”|'上' |
默认:“关闭” |
为PLC编码器配置块-配置块代码生成与万博1manbetxSimulink的PLC编码器
关闭(默认)|上
如果正在使用,请选择此参数万博1manbetxSimulink的PLC编码器以生成用于自动调节器块码。清除代码生成的参数与任何其他MathWorks公司®代码生成的产品。
选择该参数仅影响内部方框结构,对于具有兼容性万博1manbetxSimulink的PLC编码器。该参数对生成的代码无手术效果。
输出信号的配置-提供控制信号加扰动或只加扰动
控制动作+扰动(默认)|仅摄
默认情况下,块以控制信号作为输入,并提供控制信号和端口的实验扰动U +量Δu。然后将此信号输入到工厂输入,如下图所示。
此默认配置需要插入在控制器和植物之间的块。如果你想添加的扰动信号,控制信号自己,选择仅摄。在这种配置中,块的输出只包含扰动信号,在港口Δu。您将这个扰动信号注入到植物中,例如,使用一个sum块,如下图所示。
在这种配置中,您可以选择注释掉闭环PID自动调节器块而不破坏模型。
数据类型-浮点精度
双(默认)|单
指定基于仿真环境和硬件要求的浮点精度。
程序中使用
块参数:BlockDataType |
| 类型:特征向量 |
价值观:'双'|“单一” |
默认:'双' |
更新PID功能块-将调整后的PID增益写入目标控制器块
按钮
块不会自动将调整后的增益推到目标PID块。如果您的PID控制器块满足指定PID块路径参数说明,调优后,单击此按钮将调优后的增益传输到块。
而模拟运行,在外部模式下运行时,包括您可以更新PID功能块。这样做的直接验证调整PID的收益是非常有用的。在模拟期间的任何时候,你可以改变参数,重新开始实验,并推动新的调整收益的PID功能块。然后,您可以继续运行模型,观察工厂的行为。
出口到MATLAB- 发送试验和调整结果,以MATLAB的工作空间
按钮
当您单击此按钮时,程序块将在MATLAB中创建一个结构®包含实验和调优结果的工作空间。这个结构,OnlinePIDTuningResult,包含以下字段:
P,一世,d,ñ- 调谐PID收益。该结构包含这些字段的任何一个所必需的控制器类型你是微调。举例来说,如果要调优PI控制器,该结构包含P和一世,但不d和ñ。TargetBandwidth- 您在指定的值目标带宽(rad /秒)块的参数。TargetPhaseMargin- 您在指定的值目标相位裕度(度)块的参数。EstimatedPhaseMargin-估计相位裕度达到调谐系统。植物-估计的植物,作为一个返回FRD模型对象。这个FRD包含在实验频率处得到的响应数据[1/10 1/3,1,3,10]ωC。PlantNominal-在实验开始时的标称操作点上的工厂输入和输出,指定为有字段的结构ü(输入)和ÿ(输出)。
您可以在仿真运行时(包括在外部模式下运行时)将其导出到MATLAB工作区。
模型的例子
扩展功能
介绍了在R2018a
你也可以从以下列表中选择一个网站: