利用闭环PID自动调谐块实时调节PID控制器
这个例子展示了如何使用闭环PID自动调谐块对升压变流器的PID控制器进行仿真和实时调整。
电压型控制升压变换器的介绍
在本例中,电压模式升压转换器在Simulink®中使用Simscape™Electrical™组件建模。万博1manbetx这些组件的参数都是基于[1]的。
mdl =“scdboostconverterPIDTuning”;open_system (mdl)
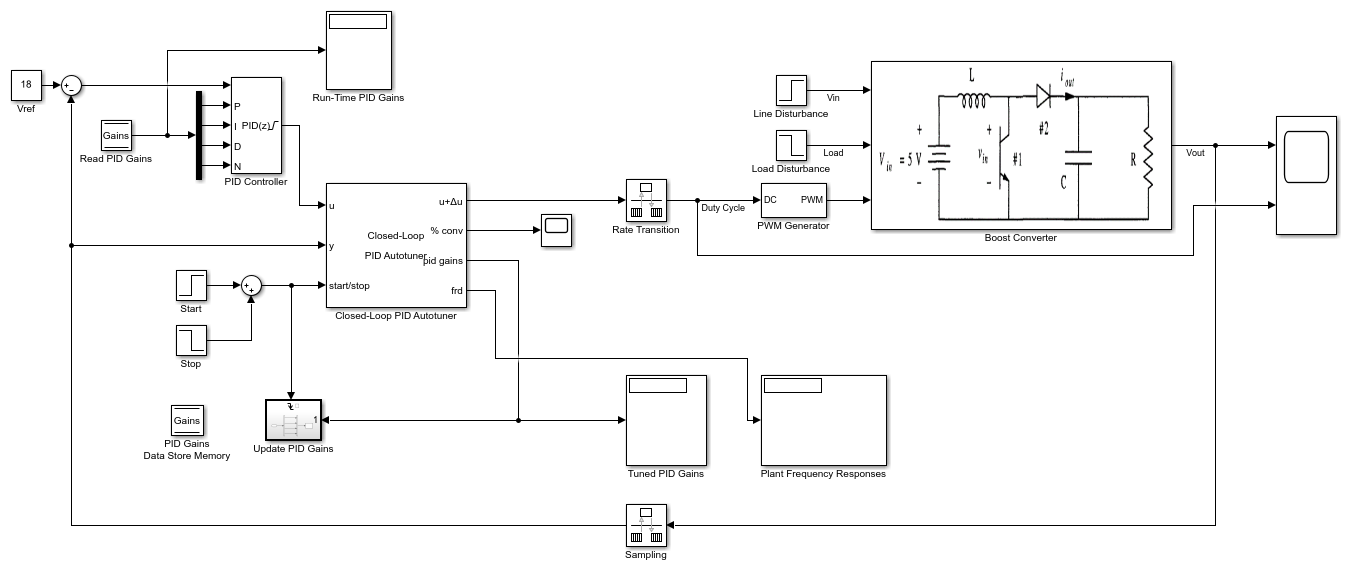
升压转换器电路通过控制切断或切换源电压,将直流电压转换成另一种更高的直流电压。在这个模型中,一个由脉宽调制(PWM)信号驱动的MOSFET被用于开关。数字PID控制器调整PWM占空比以保持负载电压输出电压在其引用Vref。
在额定工作点,负载电压为18伏,占空比约为0.74。在升压变换器运行期间,占空比可从0.1到0.85不等。
现有PID控制器的增益为P = 0.02, I = 160, D = 0.00005, N = 20000。它们存储在数据存储内存块中,并在外部提供给PID块。在闭环PID自动调谐块计算出新的增益后,使用外部增益输入允许您更改它们。
介绍了闭环PID自动调谐块
闭环PID自动调谐块允许您在仿真和实时调整单回路PID控制器。它将正弦扰动信号注入工厂的输入端,并在闭环实验中测量工厂的输出。当实验停止时,块根据在期望带宽附近估计的植物频率响应计算PID增益。
闭环PID自动调谐块在实时应用中支持两种典型的PID调优场景:万博1manbetx
(1)将block部署到硬件上,并在不使用Simulink的情况下,将其用于独立的实时应用程序中。万博1manbetx
(2)在硬件上部署block,但在Simulink中使用外部仿真模式实时监控和管理Simulink的调优过程。万博1manbetx外部模式允许在主机上运行的Simulink框图和在硬件上运行的生成代码之间进行通信。万博1manbetx
这个例子集中在第一种情形下,部署模块进行实时调整。
万博1manbetxSimulink的控制设计™还提供了实时的PID整定的开环PID自动调节器块。两个自动调谐块之间的主要区别在于,在开环PID自动调节器块执行与反馈回路打开的实验(即,现有的控制器不动作)。决定哪个自动调谐器模块是最适合你的应用程序,可以考虑:
如果没有初始控制器,可以使用开环PID自动调谐器块来获得初始控制器。您可以继续使用它来重新调整控制器或将其替换为闭环PID自动调谐器。
如果您有一个初始控制器,请使用闭环PID自动调谐块进行重新调整。主要的好处是:(1)如果在实验过程中出现了意外的干扰,现有的控制器会拒绝它,以确保安全运行;(2)现有的控制器通过抑制扰动信号,使装置在其标称工作点附近运行。
将自动调谐块与设备和控制器连接
在PID块和工厂之间插入闭环PID自动调谐块,如图boost转换器模型所示。启动/停止信号启动和停止闭环实验。当无实验运行时,闭环PID自动调谐块表现为单位增益块,其中u信号直接传给u +Δu。
在仿真和实时应用中使用闭环PID自动调谐块时,需要注意以下几点:
该装置必须是渐近稳定的(即所有极点都是严格稳定的)或积分的。自动调谐器块对不稳定装置不起作用。
与现有的控制器的反馈回路必须稳定。
为了更准确地实时估计机组的频率响应,在实验过程中尽量减少机组负荷扰动的发生。autotuner块期望工厂的输出仅是对注入的扰动信号的响应,而负载扰动会歪曲这个输出。
由于反馈回路在实验过程中是闭合的,现有的控制器也抑制了注入的扰动信号。采用闭环实验的优点是控制器使装置运行在标称工作点附近,保证了装置的安全运行。缺点是当目标带宽距离当前带宽较远时,会降低频响估计的精度。
配置自动调谐块
将闭环PID自动调谐器模块与工厂模型和PID模块正确连接后,使用模块参数来指定调谐和实验设置。
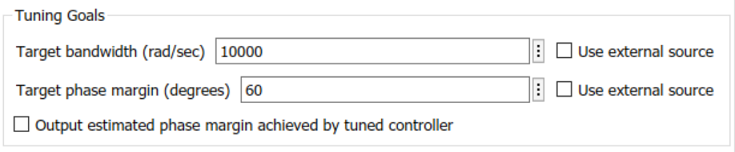
在tuning选项卡中有两个主要的调优设置:
目标带宽:决定控制器响应的速度。在本例中,选择
10000弧度/秒,这是典型的升压转换器。
目标阶段裕度:决定您希望控制器有多健壮。在本例中,选择的默认值为
60度。
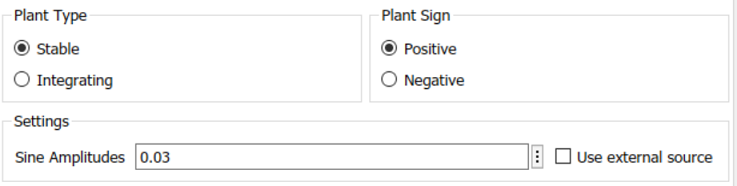
在实验选项卡中有三个主要的实验设置:
植物类型:指定设备是否是渐近稳定或整合。这本例中,升压转换器厂是稳定的。
植物星座:工厂指定是否有积极或消极的迹象。植物符号为正,如果在在工厂输出的正变化的标称工作点导致植物输入的正变化当植物达到新的稳定状态。否则,工厂符号为负。如果植物是稳定的,植物的标志是相当于其直流增益的符号。如果植物被积分,植物符号为正(或负)如果植物输出保持增大(或减小)。这本例中,升压转换器厂有着积极的植物迹象。
正弦振幅:指定注入的正弦波的振幅。在本例中,选择
0.03对于所有的五个频率的扰动信号,以确保植物是适当地激励在饱和限制。如果励磁幅值过大,升压变换器将处于断流状态。如果输入幅值太小,电力电子电路中的正弦信号就很难与波纹信号区分开来。这两种情况都会产生不准确的频响估计结果。
在正常模式下模拟自动调谐块
如果您在Simulink中构建了一个工厂模型,建议在部署它进行实时调优万博1manbetx之前,将闭环PID自动调谐器块与工厂模型在正常模式下进行模拟。模拟将帮助您识别信号连接和块设置中的问题,以便您可以在生成代码之前调整它们。
升压转换器装置仿真研究通常需要在您的计算机上几分钟,因为PWM发生器的非常快的采样时间。输出电压是植物输出和工作周期为植物输入。
sim (mdl)
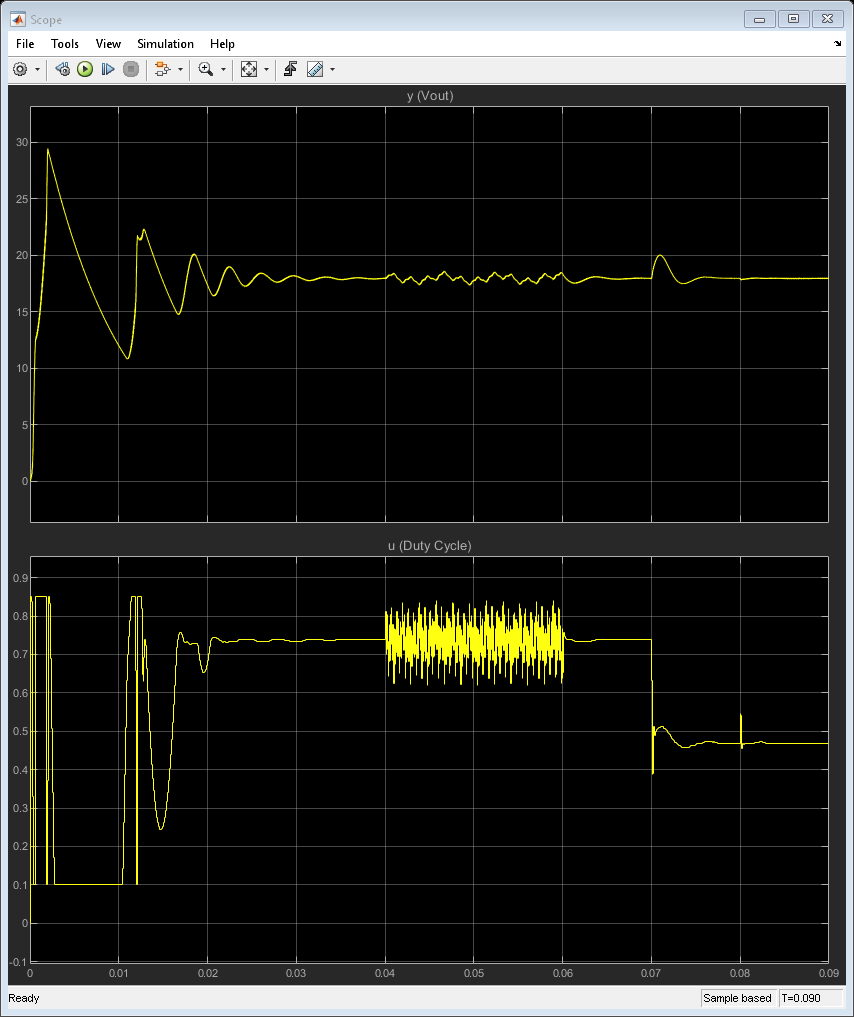
在本例中,它接受PID控制器0.04秒将升压转换器带至额定工作点。初始暂态过程中存在较强的振荡现象,说明现有的控制器需要重新调整。
在0.04几秒钟后,自动调优过程开始。实验持续0.02因为在线频响估计收敛通常需要“200/带宽”秒。
当PID调优停止时0.06秒,块计算新的增益,P = 0.04, I = 100, D = 0.00006, N = 30000。新的增益立即写入数据存储内存并发送到PID块的外部增益端口,覆盖原来的增益。
该模型具有线路扰动(Vin从5V到10V)和负载电流扰动(负载从6A到3A)。它们分别出现在0.07秒和0.08秒,您可以使用它们来检查控制器性能。新的PID增益集提供了一个改进的闭环响应更少的振荡。
在独立应用程序中使用Autotuner块
要调整针对一个独立的实时应用程序的物理升压转换器,PID控制器,你需要生成从闭环PID自动调节器模块的C / C ++代码和硬件部署。
以下是可在运行时更改的可调参数列表:
PID型
PID形式
PID积分与滤波方法(仅限离散时间)
目标带宽
目标相位裕量
植物类型
工厂签字
正弦波幅值
闭环PID自动调谐块的采样时间不是一个可调参数。若要在不重新编译的情况下使用具有不同示例时间的autotuner块,请将块对话框中的控制器示例时间设置为-1并把调谐器模块触发子系统内。调谐器块现在运行在相同的采样时间作为触发信号的需求。
参考
李[1],s.w.。电压型升压变换器的实用反馈回路分析。Application Report No. SLVA057. Texas Instruments. January 2014. www.ti.com/lit/an/slva633/slva633.pdf
bdclose (mdl)
另请参阅
相关话题
你也可以从以下列表中选择一个网站: