文档帮助中心文档
感官
湿度读数
读取压力
读取温度
再角度速度
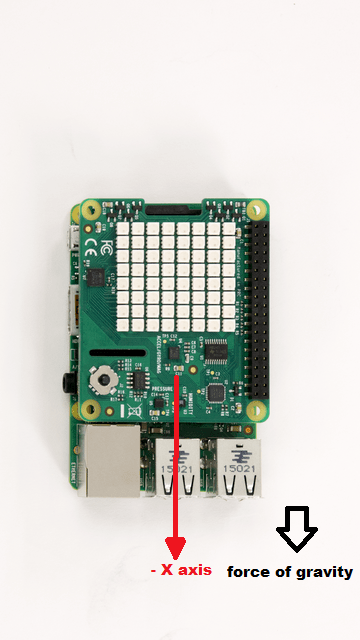
再加速
读取磁场
阅读操纵杆
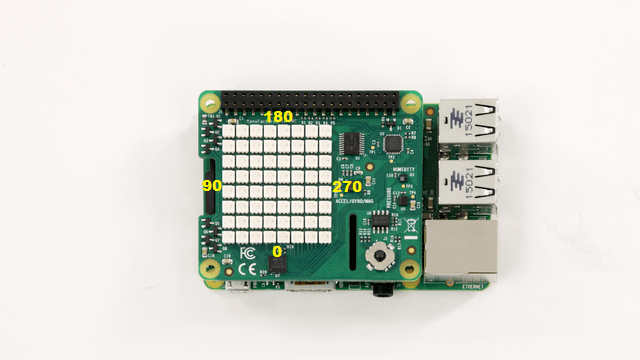
显示图像
写像素
透明矩阵
显示消息
拉斯皮
读取传感器值,读取操纵杆位置并控制Raspberry Pi上的LED矩阵™ 用MATLAB实现传感帽™ Raspberry Pi硬件支持包。万博1manbetx
使用MATLAB®读取Raspberry Pi Sense帽子上的加速计,并控制LED矩阵上显示图像的旋转。
使用MATLAB命令通过TCP/IP将数据从Raspberry Pi Sense HAT发送到Android设备,并从Android设备接收RGB颜色值,并将其显示在Sense HAT的LED矩阵上。
您单击了与此MATLAB命令对应的链接:
通过在MATLAB命令窗口中输入命令来运行该命令。Web浏览器不支持MATLAB命令。万博1manbetx
选择一个网站以获取翻译后的内容(如果可用),并查看本地活动和优惠。根据您的位置,我们建议您选择:.
您还可以从以下列表中选择网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家/地区网站未针对您所在地的访问进行优化。
联系当地办事处