竞争开关
库:
万博1manbetx仿真软件编万博1manbetx码器支持包烦恼EDR版本5的机器人的大脑
描述
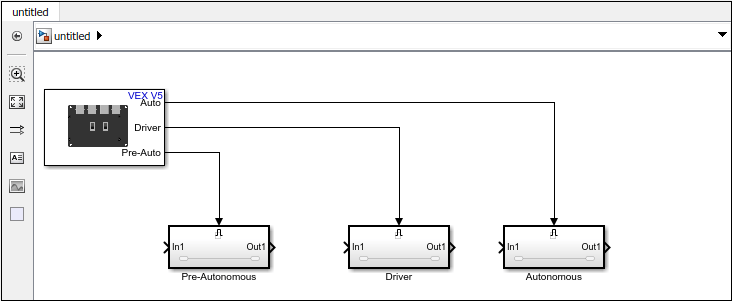
竞争开关块用于读取开关VEXnet竞争的位置开关,并提供相应的逻辑值(1或0)作为输出。可以使用此块Pre-Autonomous启用所需的逻辑,自治和驱动程序控制模式,基于开关位置。
港口
输出
参数
版本历史
介绍了R2019a

库:
万博1manbetx仿真软件编万博1manbetx码器支持包烦恼EDR版本5的机器人的大脑
竞争开关块用于读取开关VEXnet竞争的位置开关,并提供相应的逻辑值(1或0)作为输出。可以使用此块Pre-Autonomous启用所需的逻辑,自治和驱动程序控制模式,基于开关位置。
介绍了R2019a