gpsSensor
GPS接收机仿真模型
描述
这gpsSensor系统对象™模型来自全球定位系统(GPS)接收器的数据输出。
要模拟GPS接收器:
创建
gpsSensor对象,并设置其属性。使用参数调用对象,就像调用函数一样。
要了解有关系统对象如何工作的更多信息,请参阅什么是系统对象?.
创建
句法
描述
全球定位系统= GPSSensor.gpsSensor基于本地位置和速度输入信号计算全局定位系统接收器读数的系统对象。大地测量坐标中的默认参考位置是
纬度:0O.N
经度:0O.E.
高度:0米
全球定位系统= gpsSensor ('参考范围'那射频)gpsSensor系统对象,用于相对于参考帧读取全局定位系统接收器读取的系统对象射频.指定射频作为NED的(North-East-Down)或“ENU表示”(East-North-Up)。默认值为NED的.
全球定位系统(GPS) = gpsSensor (___那设置每个属性名称,价值)的名字到指定的价值.未指定的属性具有默认值。
属性
对象功能
要使用对象函数,请将System对象指定为第一个输入参数。例如,要发布命名的系统对象的系统资源obj.,使用下面的语法:
发行版(obj)
例子
从静止输入产生GPS位置测量
创建一个gpsSensor系统对象™用于建模GPS接收器数据。假设一个典型的1hz采样率和1000秒的模拟时间。根据美国麻州纳蒂克的纬度、经度和海拔(LLA)定义参考位置。通过指定真实位置和速度为零来定义传感器为静止的。
fs = 1;时间= 1000;numSamples = * fs持续时间;refLoc = [42.2825 -71.343 53.0352];truePosition = 0 (numSamples, 3);trueVelocity = 0 (numSamples, 3);全球定位系统(gps) = gpsSensor (“SampleRate”fs,'参考',回流);
调用全球定位系统用指定的truePosition和trueVelocity模拟在静止平台上接收GPS数据。
位置= GPS(Trueposition,TrueVelocity);
绘制真实位置和GPS传感器的位置读数。
t = (0: (numSamples-1)) / fs;子图(3,1,1,1)绘图(t,位置(:,1),...t的(numSamples) * refLoc(1)标题(“GPS传感器读数”) ylabel ('纬度(度)'子图(3,1,2)plot(t, position(:,2),...t的(numSamples) * refLoc (2)) ylabel ('经度(度)')子图(3,1,3)绘图(t,位置(:,3),...t的(numSamples) * refLoc (3)) ylabel (的高度(米))包含(“时间(s)”)
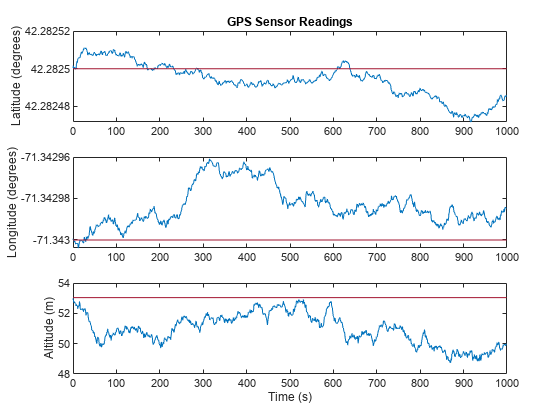
位置读数有噪声控制横向定位那VerticalPositionAccuracy那VelocityAccuracy,DecayFactor.这DecayFactor属性控制噪声模型中的漂移。默认情况下,DecayFactor被设置为0.999,近似于随机漫步过程。观察其效果DecayFactor属性:
重置
全球定位系统对象。放
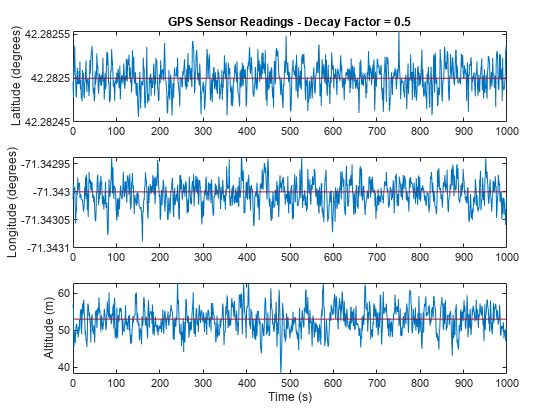
DecayFactor来0.5.调用
全球定位系统用变量指定固定位置。策划的结果。
这全球定位系统位置读数现在围绕真实位置振荡。
重置(GPS)GPS.Decayfactor = 0.5;位置= GPS(Trueposition,TrueVelocity);子图(3,1,1,1)绘图(t,位置(:,1),...t的(numSamples) * refLoc(1)标题('GPS传感器读数-衰减系数= 0.5') ylabel ('纬度(度)'子图(3,1,2)plot(t, position(:,2),...t的(numSamples) * refLoc (2)) ylabel ('经度(度)')子图(3,1,3)绘图(t,位置(:,3),...t的(numSamples) * refLoc (3)) ylabel (的高度(米))包含(“时间(s)”)
地面速度与航向精度的关系
GPS接收器随着底线的增加而获得更大的课程精度。在此示例中,您可以创建GPS接收器仿真对象,并模拟从静止位置加速的平台接收的数据。
创建默认值gpsSensor系统对象™以GPS接收器返回的模型数据。
全球定位系统(GPS) = gpsSensor
GPS = gpsSensor with properties: SampleRate: 1 Hz PositionInputFormat: 'Local' ReferenceLocation: [0 0 0] [deg deg m] HorizontalPositionAccuracy: 1.6 m VerticalPositionAccuracy: 3 m VelocityAccuracy: 0.1 m/s RandomStream: 'Global stream' DecayFactor: 0.999
创建矩阵来描述平台在NED坐标系中的位置和速度。平台从静止位置开始,向东北方向加速60 m/s,超过60秒,然后垂直加速度2 m/s,超过2秒,然后以2 m/s的速度爬升8秒。假设速度是恒定的,这样速度就是位置的简单导数。
时间= 70;numSamples = * GPS.SampleRate持续时间;课程= 45 *的(持续时间,1);水平速度=[(一60);60 * 1 (1)];Nvelocity =水平。*信德(课程);Evelocity =水平。* cosd(课程);Dvelocity = [0 (60, 1); 1; 2 * 1 (9,1)];NEDvelocity = [Nvelocity、Evelocity Dvelocity];Ndistance = cumsum (Nvelocity);Edistance = cumsum (Evelocity); Ddistance = cumsum(Dvelocity); NEDposition = [Ndistance,Edistance,Ddistance];
模型GPS测量数据调用全球定位系统物体的速度和位置矩阵。
[〜,〜,奠基,治疗] = GPS(NedPosition,Nedvelocity);
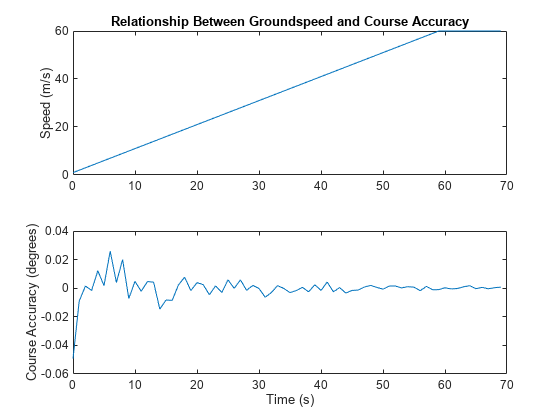
绘制地面速度和真实航向与GPS模拟器返回的航向之间的差值。
随着地面速度的增加,航向的准确性也会增加。注意,在最后十秒速度的增加没有影响,因为额外的速度不在地平面上。
t =(0:numsamples-1)/gps.samplerate;子图(2,1,1)绘图(T,奠基);ylabel(“速度(米/秒)”)标题(“地面速度和航向精度之间的关系”) subplot(2,1,2) courseAccuracy = coursemmeasurement - course;情节(t, courseAccuracy)包含(“时间(s)”);ylabel(“当然精度(度)”)
模型GPS接收器数据
模拟从马萨诸塞州的纳蒂克市到马萨诸塞州的波士顿的轨道期间接收的GPS数据。
定义美国马萨诸塞州纳蒂克市和美国马萨诸塞州波士顿市的十进制纬度和经度。为简单起见,将这两个位置的高度设置为零。
NatickLLA = [42.27752809999999, - 71.3468090999999997, 0];BostonLLA = [42.3600825, -71.05888010000001, 0];
定义一个可以在20分钟内从纳蒂克到波士顿的平台的动议。设置本地NED坐标系原点为Natick。创建一个waypointTrajectory对象一次输出轨迹10样本。
fs = 1;时间= 60 * 20;轴承= 68;%程度距离= 25.39 e3;%米距离=距离* Sind(轴承);Distancentorth =距离* COSD(轴承);natickned = [0,0,0];bostonned = [distanceNorth,距离,0];trajectory = waypointtrajectory(...“锚点”,[natickned; bostonned],...“TimeOfArrival”(0;持续时间),...'samplesperframe'10...“SampleRate”fs);
创建一个gpsSensor对象模型为平台接收GPS数据。设定横向定位来25和DecayFactor来0.25强调噪音。设定参考要求在LLA的Natick坐标。
全球定位系统(GPS) = gpsSensor (...“HorizontalPositionAccuracy”25岁的...'腐朽活动器', 0.25,...“SampleRate”fs,...'参考', NatickLLA);
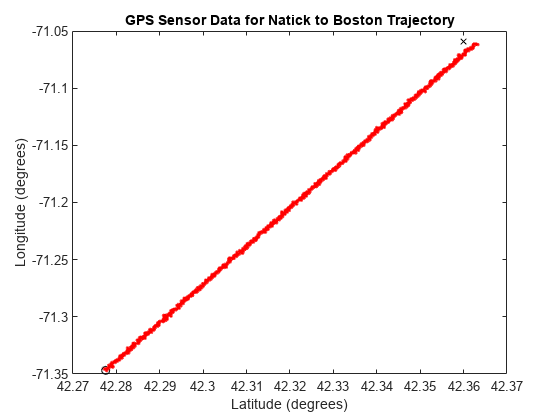
打开图表,绘制出Natick和Boston在LLA的位置。简单起见,忽略高度。
在循环中,调用gpsSensor目标与地面真实轨道,以模拟接收的GPS数据。绘制地面真实轨迹和接收的GPS数据模型。
图(1)情节(NatickLLA (1) NatickLLA (2),“柯”那...Bostonlla(1),Bostonlla(2),“kx”)包含('纬度(度)') ylabel ('经度(度)')标题(“纳蒂克到波士顿轨道的GPS传感器数据”)举行在而~isDone(trajectory) [truePositionNED,~,true eveloocityned] = trajectory();reportedPositionLLA = GPS (truePositionNED trueVelocityNED);图(1)情节(reportedPositionLLA (: 1), reportedPositionLLA (:, 2),'r。')结尾
作为一种最佳实践,在完成时释放System对象。
发布(GPS)发布(轨迹)
扩展功能
你也可以从以下列表中选择一个网站: