主要内容
模拟3D演员转换集
套装演员翻译,旋转,比例尺
- 图书馆:
车辆动力学阻滞 /车辆方案 / SIM3D / SIM3D核心

描述
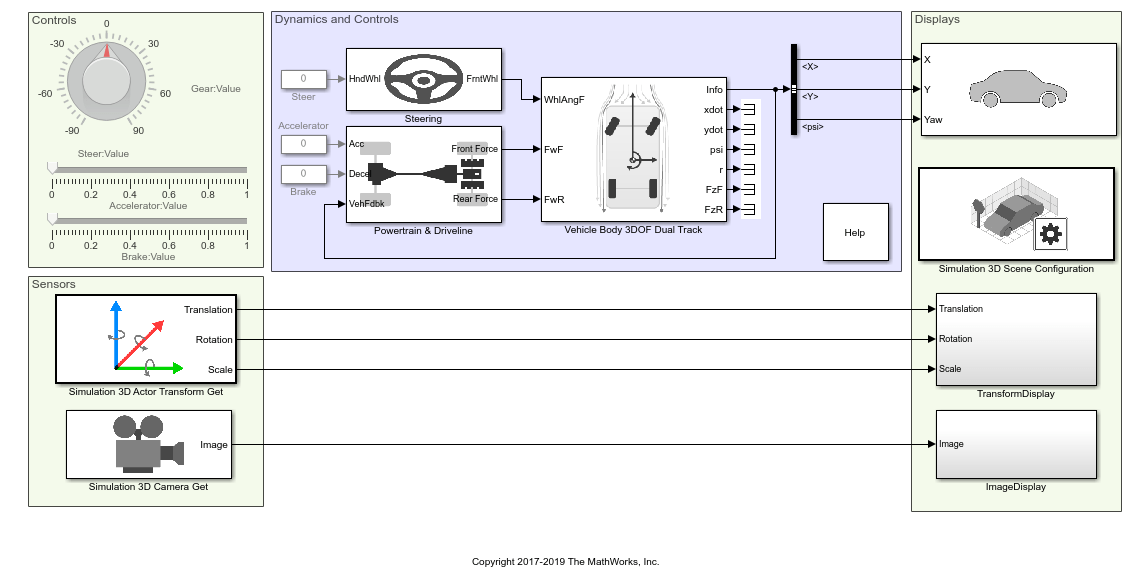
这模拟3D演员转换集块在3D可视化环境中设置了演员的翻译,旋转和比例。
该块使用最初与惯性世界坐标系对齐的车辆固定坐标系。
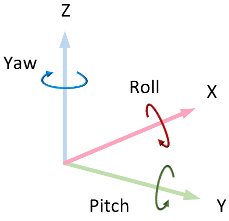
| 轴 | 描述 |
|---|---|
| X | 车辆向前方向 滚动 - 右手旋转X-轴 |
| y | 延伸到车辆的右侧,最初平行于接地平面 俯仰 - 右手旋转y-轴 |
| z | 向上延伸 偏航 - 左手旋转z-轴 |
演员是支持3D翻译,旋转和比例尺的场景对象。万博1manbetx零件是演员组件。组件本身不存在;他们与演员有关。
小费
验证模拟3D演员转换集块在仿真3D场景配置堵塞。那样,模拟3D演员转换集在虚幻引擎之前准备信号数据®3D可视化环境接收到它。要检查块执行订单,请右键单击块并选择特性。在一般的标签,确认这些优先设置:
仿真3D场景配置-
0模拟3D演员转换集-
-1
有关执行订单的更多信息,请参阅控制和显示执行顺序。
端口
输入
参数
模型示例
在R2018A中引入