仿真3D摄像机Get
相机图像
- 库:
车辆动力学Blockset /车辆场景/ Sim3D / Sim3D Core

描述
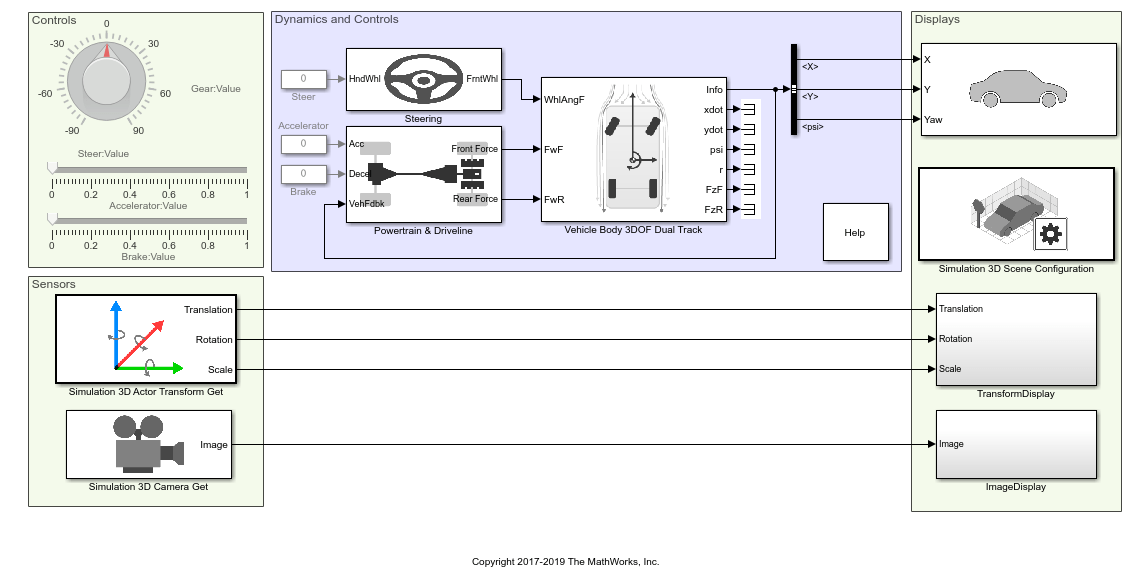
的仿真3D摄像机Get块提供了一个界面到一个理想的摄像机在3D可视化环境。图像输出是一个红、绿、蓝(RGB)数组。
如果您将采样时间设置为1中指定的样本时间仿真三维场景配置块。要使用这个传感器,请确保仿真三维场景配置Block在您的模型中。
提示
验证仿真三维场景配置块执行。仿真3D摄像机Get块。这样,虚幻引擎®三维可视化环境对数据进行预处理仿真3D摄像机Get块接收到它。要查看块的执行顺序,右键单击块并选择属性。在一般选项卡,确认这些优先级设置:
仿真三维场景配置- - - - - -
0仿真3D摄像机Get- - - - - -
1
有关执行顺序的详细信息,请参见控制和显示执行顺序。
港口
输出
参数
传感器标识符-识别唯一传感器的数字
0(默认)|正整数
唯一的传感器标识符,指定为一个正整数。这个数字用于识别特定的传感器。传感器标识符用于区分多传感器系统中的传感器。
例子:2
车的名字-车辆名称
现场的起源(默认)|字符向量
汽车的名字。Block提供模型中的车辆列表。如果您选择现场的起源,该块将传感器放置在现场原点。
例子:万博1manbetxSimulinkVehicle1
车辆安装位置-传感器安装位置
起源(默认)|前保险杠|后保险杠|正确的镜子|离开了镜子|后视镜|罩中心|屋顶中心
传感器安装位置。
当车的名字是
现场的起源,所述块将传感器安装到场景原点,并且安装位置可以设置为起源只有。在模拟过程中,传感器保持静止。当车的名字是车辆的名称(例如,
万博1manbetxSimulinkVehicle1)块将传感器安装到表中描述的预定义安装位置之一。在模拟过程中,传感器与车辆一起移动。
| 车辆安装位置 | 描述 | 相对于车辆原点的方向[滚,俯仰,偏航](度) |
|---|---|---|
起源 |
前向传感器安装在车辆原点,在地面上,在车辆的几何中心
|
(0, 0, 0) |
前保险杠 |
前置传感器安装在前保险杠上
|
(0, 0, 0) |
后保险杠 |
后向传感器安装在后保险杠
|
(0, 0, 180) |
正确的镜子 |
向下的传感器安装在右侧后视镜
|
-90年[0,0] |
离开了镜子 |
向下的传感器安装在左侧后视镜
|
-90年[0,0] |
后视镜 |
前向传感器安装在汽车内部的后视镜上
|
(0, 0, 0) |
罩中心 |
前向传感器安装在引擎盖的中心
|
(0, 0, 0) |
屋顶中心 |
前向传感器安装在车顶中央
|
(0, 0, 0) |








(X,Y,Z)传感器相对于车辆的位置取决于车辆类型。要指定车辆类型,请使用类型参数的仿真三维场景配置正在装入的块。这些表格显示了X,Y,Z车辆坐标系统中传感器的位置。在这个坐标系中:
的X-轴指向车辆前方。
的Y-轴指向车辆的左边,当面对前方时。
的Z-轴从地面向上指向。
滚动,俯仰,和偏航是顺时针积极时,看在积极的方向X设在,Y设在,Z分别设在。当从上往下看飞行器时,偏航角(即方向角)是逆时针正的,因为你看的是轴的负方向。
箱式卡车-相对于车辆来源的传感器位置
| 安装位置 | X(米) | Y(米) | Z (m) |
|---|---|---|---|
前保险杠 |
5.10 | 0 | 0.60 |
后保险杠 |
5 | 0 | 0.60 |
|
2.90 | 1.60 | 2.10 |
|
2.90 | -1.60 | 2.10 |
|
2.60 | 0.20 | 2.60 |
|
3.80 | 0 | 2.10 |
|
1.30 | 0 | 4.20 |
两厢车-相对于车辆来源的传感器位置
| 安装位置 | X(米) | Y(米) | Z (m) |
|---|---|---|---|
前保险杠 |
1.93 | 0 | 0.51 |
后保险杠 |
-1.93 | 0 | 0.51 |
|
0.43 | -0.84 | 1.01 |
|
0.43 | 0.84 | 1.01 |
|
0.32 | 0 | 1.27 |
|
1.44 | 0 | 1.01 |
|
0 | 0 | 1.57 |
肌肉车-传感器位置相对于车辆起源
| 安装位置 | X(米) | Y(米) | Z (m) |
|---|---|---|---|
前保险杠 |
2.47 | 0 | 0.45 |
后保险杠 |
-2.47 | 0 | 0.45 |
|
0.43 | -1.08 | 1.01 |
|
0.43 | 1.08 | 1.01 |
|
0.32 | 0 | 1.20 |
|
1.28 | 0 | 1.14 |
|
-0.25 | 0 | 1.58 |
轿车-相对于车辆起源的传感器位置
| 安装位置 | X(米) | Y(米) | Z (m) |
|---|---|---|---|
前保险杠 |
2.42 | 0 | 0.51 |
后保险杠 |
-2.42 | 0 | 0.51 |
|
0.59 | -0.94 | 1.09 |
|
0.59 | 0.94 | 1.09 |
|
0.43 | 0 | 1.31 |
|
1.46 | 0 | 1.11 |
|
-0.45 | 0 | 1.69 |
小型皮卡-传感器位置相对于车辆起源
| 安装位置 | X(米) | Y(米) | Z (m) |
|---|---|---|---|
前保险杠 |
3.07 | 0 | 0.51 |
后保险杠 |
-3.07 | 0 | 0.51 |
|
1.10 | -1.13 | 1.52 |
|
1.10 | 1.13 | 1.52 |
|
0.85 | 0 | 1.77 |
|
2.22 | 0 | 1.59 |
|
0 | 0 | 2.27 |
运动型多用途车-传感器位置相对于车辆起源
| 安装位置 | X(米) | Y(米) | Z (m) |
|---|---|---|---|
前保险杠 |
2.42 | 0 | 0.51 |
后保险杠 |
-2.42 | 0 | 0.51 |
|
0.60 | 1 | 1.35 |
|
0.60 | 1 | 1.35 |
|
0.39 | 0 | 1.55 |
|
1.58 | 0 | 1.39 |
|
-0.56 | 0 | 2 |
例子:起源
指定偏移量-指定挂载位置的偏移量
从(默认)|在
选择此参数以指定相对于挂载位置的偏移量。
相对翻译[X, Y, Z]-从安装位置平移偏移量
(0, 0, 0)(默认)|实值1 × 3向量
指定从挂载位置到车辆坐标系统的平移偏移量X,Y,Z轴。单位是米。
的X-轴指向车辆前方。
的Y-轴指向车辆的左边,当面对前方时。
的Z设在点。
例子:(0, 0, 0.01)
依赖关系
选择启用该参数指定偏移量。
相对旋转[翻滚,俯仰,偏航]-从安装位置旋转偏移
(0, 0, 0)(默认)|实值1 × 3向量
指定从安装位置到车辆坐标系的旋转偏移量X,Y,Z轴。单位是度。
横摇角旋转的角度是X-车辆坐标系的轴。一个正的滚动角度对应于顺时针旋转时,看在积极的方向X设在。
螺旋角旋转的角度是Y-车辆坐标系的轴。一个正螺距角对应的顺时针旋转时,看的正方向Y设在。
偏航角旋转的角度是Z车辆坐标系的。正偏航角对应于顺时针旋转时,看的正方向Z设在。
例子:(0, 0, 10)
依赖关系
选择启用该参数指定偏移量。
样品时间——样品时间
1(默认)|正标量
块的采样时间(秒)。三维仿真环境帧速率是采样时间的倒数。
如果您将采样时间设置为1中指定的样本时间仿真三维场景配置块。
水平分辨率——像素
uint32 (1280)(默认)|标量
水平图像分辨率,以像素为单位。
垂直分辨率——像素
uint32 (720)(默认)|标量
垂直图像分辨率,以像素为单位。
水平视场-视野
单(60)(默认)|标量
水平视场(FOV),在程度。
模型的例子
你也可以从以下列表中选择一个网站: