Simulation 3D Motorcycle
Implement motorcycle in 3D environment
- Library:
Vehicle Dynamics Blockset / Vehicle Scenarios / Sim3D / Sim3D Vehicle / Components
Description
TheSimulation 3D Motorcycleblock implements a motorcycle with two wheels in the 3D simulation environment.
To use this block, ensure that theSimulation 3D Scene Configurationblock is in your model. If you set theSample timeparameter of this block to-1, the block uses the sample time specified in theSimulation 3D Scene Configurationblock.
The block input uses the vehicle Z-downright-handed(RH)Cartesiancoordinate system defined in SAE J6701. The coordinate system is inertial and initially aligned with the vehicle geometric center:
X-axis — Along vehicle longitudinal axis, points forward
Y-axis — Along vehicle lateral axis, points to the right
Z-axis — Points downward
Tip
Verify that theSimulation 3D Motorcycleblock executes before theSimulation 3D Scene Configurationblock. That way,Simulation 3D Motorcycleprepares the signal data before the Unreal Engine®3D visualization environment receives it. To check the block execution order, right-click each block and selectProperties. On theGeneraltab, confirm thesePrioritysettings:
Simulation 3D Scene Configuration—
0Simulation 3D Motorcycle—
-1
For more information about execution order, seeControl and Display Execution Order.
Ports
Input
Parameters
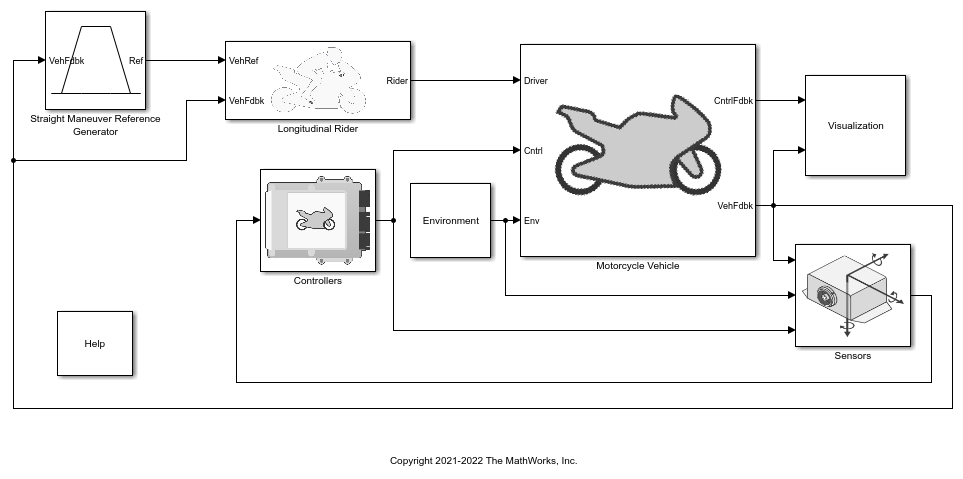
Model Examples
References
[1] Vehicle Dynamics Standards Committee.Vehicle Dynamics Terminology J670. Warrendale, PA: SAE International, 2008.
Version History
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)